KS B ISO 10218-2:2025 개정 해설
SI와 로봇 사용 기업을 위한 핵심 변경사항 및 실무 대응 가이드
본 인사이트 자료에 사용된 이미지는 예고·고시 기간 중 게시된 표준 원문을 캡처한 것이며, 개정 확정 이후 원문과 일부 내용이 달라질 수 있습니다.
1. 개정 배경
2011년 산업용 로봇 안전 표준이 처음 등장했던 시절, 로봇은 격리된 공간에서 단순 작업을 수행하는 기계에 불과했습니다. 특히 AI 기술과 유/무선 네트워크를 활용한 자동화 기술은 기술 숙련도가 낮았고, 관련 위험성은 심각한 논의 대상이 아니었습니다.
그러나 로봇 기술은 14년이라는 시간 동안 물리적/기술적 경계를 허물었고, '4차 산업혁명' 이라는 개념의 등장으로 기존의 안전 패러다임은 엄청난 전환을 맞이했습니다.
로봇이 작업자의 곁으로 다가왔고, 자동화 시스템은 IoT, 디지털 트윈과 같은 기술을 통해 실시간으로 연동되고 있으며, 머지않아 휴머노이드 로봇까지 현장에 투입 됩니다. 실제로 ISO(국제표준화기구)에서는 이미 휴머노이드 안전 표준(ISO 25785-1) 작업에 돌입하며 이러한 변화에 대응하고 있습니다.
79페이지에 불과한 과거의 가이드라인으로는 지능화·네트워크화된 현재의 로봇 리스크를 통제할 수 없습니다. 개정된 ISO 10218-2 표준이 기존 대비 3배 이상 늘어난 244페이지 분량으로 전면 개정된 것은, 시대 변화에 맞춘 '안전 기준의 재정립'과 '희미했던 경계에 대한 명확한 가이드' 를 의미합니다.
개정 핵심 요인 6가지

2. 주요 변경사항
4가지 핵심 변경사항을 먼저 정리하였습니다. 각 항목은 구버전과의 비교, 표준 조항 번호, 통합자(SI)와 사용자(End-User)에게 미치는 영향으로 구성되어 있습니다.
핵심: 통합자는 로봇 자체만이 아니라 작업물의 크기·형상·위험성, 작업 프로그램의 경로와 속도, 그리고 관련 기계 전체를 포함한 '로봇 응용' 및 '로봇 셀'의 위험성을 평가해야 함
| 협동 안전기능 | 구버전 (5.11.5) | 개정판 (5.14) |
|---|---|---|
| 안전 정격 감시 정지 (Safety-Rated Monitored Stop) |
협동 운전 방식 중 하나로 명시 | 5.5.8 → 감시 정지(Monitored Standstill) 안전기능으로 재정의 |
| 핸드가이딩 제어 (HGC) |
4가지 종류의 매우 기초적인 요구사항만 나열 | 5.14.4 → 가이딩 장치 설계 상세 요구사항 → HGC 중 감시 정지 조건 |
| 속도 및 이격 감시 (SSM) |
'ISO/TS 15066 준비 중' 비고만 기재 | 5.14.5 + 부속서 L(규정)으로 통합 - 이격거리 공식: Sp = Sh + Sr + Ss + C + Zd + Zr - Sh(사람의 위치 변화에 따른 이격거리) · Sr(로봇 응용의 반응 시간에 따른 이격거리) · Ss(정지하는 동안 발생하는 안전 거리) · C(침입거리) · Zd(센서의 감지 불확실성) · Zr(로봇 위치 불확실성) - 계산 변수 정의와 계산 방법 상세 제공 (부속서 L.1 ~ L.3) |
| 동력 및 힘 제한 (PFL) |
'ISO/TS 15066 준비 중' 비고만 기재 | - 충돌 상황을 ① 끼임이 발생하는 경우(준정적)와 ② 그냥 부딪히고 튕겨나가는 경우(동적)로 구분해야 함을 명시 - ISO/TS 15066 표준에 존재하던 신체 부위별 허용값을 부속서 M으로 수록 - 충돌 시 발생하는 힘과 압력 계산을 측정 장비 (PFMD, Power and Force Measuring Device) 또는 컴퓨터 시뮬레이션으로 검증이 가능함을 명시 |
| 항목 | 구버전 | 개정판 |
|---|---|---|
| PL d 달성 구조 PL(성능수준, Performance Level): 안전기능의 신뢰도 등급. a~e 중 d가 로봇 분야 기본 요구 |
Category 3 구조 필수 (고정) | - 구버전에는 반드시 이중 채널(Category 3) 구조만 허용함 - 개정판에서는 시간당 위험 고장 확률(PFHD)이 4.43×10⁻⁷/h 미만이면(ISO 10218-2:2025, 5.5.3) 구조 방식에 관계없이 허용되어 더 다양한 설계 방법을 선택할 수 있게 됨 |
| 성능 결정 방법 PLr = 요구 성능수준(required PL), SIL = 안전 무결성 수준(Safety Integrity Level) |
모든 안전기능에 PL d 고정 적용 | - 이제 모든 기능에 일괄 적용하지 않고, - ① 표준 부속서의 목록에서 직접 선택하거나 - ② 위험성 평가 결과에 따라 기능마다 개별 결정할 수 있게 됨 - 즉, 덜 위험한 기능은 더 낮은 수준으로, 핵심 기능은 더 높은 수준으로 차별화가 가능 |
| Category 2로 PL d 달성 Category = 안전 제어 시스템의 구조 유형(1~4). DCavg = 평균 진단 범위, MTTFD = 위험 고장까지 평균 시간 |
규정 없음 | - 단일 채널(Category 2) 구조로도, 진단 범위(DCavg)가 90% 초과이고 위험 고장까지 평균 시간(MTTFD)이 62년 초과이면 PL d 달성을 허용 - Safety PLC 등 전자적인 안전 솔루션의 범위가 확장됨 ※ 표준 원문 근거: ISO 10218-2:2025, 5.5.3 비고 2 — "DCavg > 90 % & MTTFD > 62 years" |
| 안전기능 파라미터 안전기능의 속도 한계·정지 거리·감지 범위 등 수치 설정값 |
파라미터 보호 언급 없음 | - 속도 한계·감지 거리 등 안전 수치 설정값을 함부로 변경할 수 없도록 잠금 체계가 신설 - 권한을 가진 인원만 안전 관련 설정값을 변경할 수 있고, 변경 후에는 반드시 재시작이 필요하며, 변경 이력도 자동 기록되어야 함 - 로봇 가동 중에는 변경 자체가 불가능해야 함 |
| 통신 관련 보안 | 언급 없음 | - 안전기능 구현에 데이터 통신을 사용하는 경우, IEC 61508-2:2010 7.4.11을 적용해야 함(5.5.9) - 네트워크를 3가지 전송 범주로 분류하여 각 범주의 특성에 맞는 대책(반복·손실·삽입·순서·위변조·지연·위장 등)을 적용해야 함 - 안전 네트워크·필드버스 사용 시 반드시 체크리스트에 포함해야 함 |
⚠️ 5.2.16 사이버 보안 — 개정판 신설
요구사항 1: 사이버 보안 위협 평가를 수행해야 함
요구사항 2: 평가 결과 위협이 안전 관련 위험을 초래할 수 있으면:
- 제어 시스템의 하드웨어·소프트웨어·구성 데이터·응용 프로그램에 대한 무단 접근 방지 조치 필요
- 포함 가능 조치: 통신 포트(TCP/UDP) 접근 차단 기능 / 포트 번호 변경 기능 / 인증을 통한 안전 구성의 보호 / 기본 구성(사용자명, 비밀번호, IP 주소, 안전 인증) 변경 기능
사이버 보안 관련 참조 표준:
- ISO/TR 22100-4:2018 — 기계류 안전과 ISO 12100의 관계 / IT 보안(사이버보안) 가이던스
- IEC TS 63074:2023 — 기계류 안전 / 기능 안전 관련 보안 측면
- IEC 62443-3-3:2013 — 산업용 통신 네트워크 및 시스템 보안
3. 정지 기능 및 속도 안전기능 체계 재편
구버전 표준에서 불분명했던 개념들이 개정판 표준에서 독립적인 안전기능으로 정의되거나 새롭게 추가되었습니다.
특히, 작업 사이클 종료, 부품 교체, 부품 공급을 위한 일시 정지 등 일상적인 작업 상황에서의 정지에 대한 요구사항이 명확하지 않아, 현장에서는 비상정지를 일시적인 정지 수단으로 오용하는 등의 문제가 있었습니다.
① 정상정지(Normal Stop, 5.6.4)
| 구분 | 비상정지 (5.6.2) | 보호정지 (5.6.3) | 정상정지 (5.6.4) 신설 |
|---|---|---|---|
| 목적 | 즉각적인 위험 상황 대응 | 안전 장치 신호에 의한 자동 정지 | 일상적인 작업 흐름 내 계획적 정지 |
| 개시 주체 | 작업자 수동 조작 | 내부 안전기능 또는 외부 보호장치 | 제어 스테이션의 정상정지 제어 장치 |
| 성능 요구 | PL c 이상 (부속서 C 표 C.1) | PL d 이상 (부속서 C 표 C.1) | PL b 이상 (부속서 C 표 C.1) |
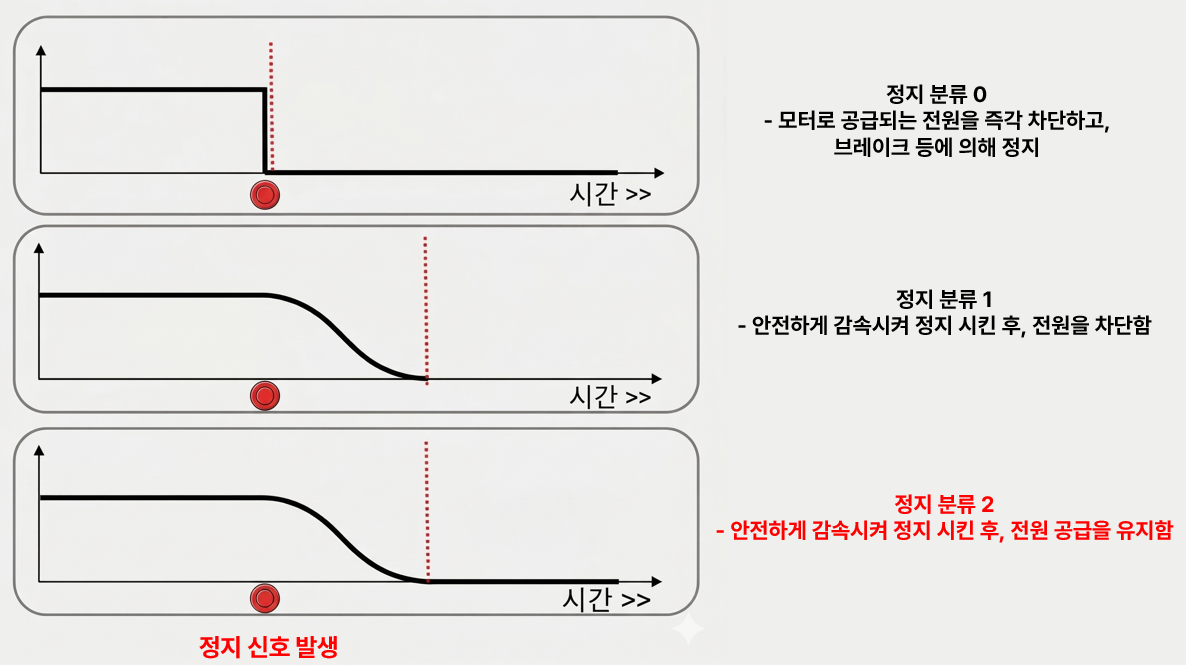
| 정지 분류 | 0 또는 1 | 0, 1 또는 2 | 0 또는 1 |
| 겸용 가능 여부 | 정상정지 용도로 사용 불가 | 정지 분류 0 또는 1 적용 시 정상정지로 활용 가능 | — |
⚠️ 개정판 5.6.4(정상정지)의 핵심
정상정지 개념이 도입되면서, 비상정지 장치를 정상정지 장치로 사용하는 것은 금지됩니다.
일상적인 정지인 만큼 최소 PL b로 설계 가능하지만, 안전을 위해 정지 후에는 구동기의 에너지를 제거해야 합니다.
보호정지 방식을 정지 분류 0 또는 1로 적용하는 경우, 정상정지로 사용이 가능합니다.
② 감시 정지(Monitored Standstill, 5.5.8) — 개념 변화
구버전에서는 '안전 정격 감시 정지(SMS)'가 협동 운전 방식의 하나로 언급되었습니다. 개정판에서는 이 개념이 독립된 안전기능으로 격상되어 협동 응용 외에도 정지 분류 2를 사용하는 모든 로봇 응용에서 필수 요건이 되었습니다.
정지 분류 2 (Stop Category 2) 란?
IEC 60204-1은 정지 방식을 분류 0·1·2로 나눕니다. 이 중 분류 2는 모터 전원을 끄지 않고 멈추는 방식으로, 재기동이 빠르고 위치를 그대로 유지할 수 있어 협동 응용처럼 작업자와 로봇이 같은 공간을 쓰는 상황에 적합합니다.
단, 전원이 살아있는 채로 멈춰 있으므로 실제로 움직이지 않는지 지속적으로 감시해야 하는데, 이것이 바로 '감시 정지(Monitored Standstill)' 기능이 필요한 이유입니다.
구버전의 "안전 정격 감시 정지(SMS)"가 개정판에서 "감시 정지(monitored-standstill, 5.5.8)"로 명칭이 단순화되고, 협동 운전 절 내부 개념에서 독립 안전기능으로 격상되었습니다. 정지 분류 2를 사용하는 모든 로봇 응용에서 필수로 적용됩니다.
감시 정지의 적용 예시
- HGC(핸드가이딩) 종료 시 — 작업자가 손을 떼면 감시 정지로 전환. 전원이 유지된 채 그 위치를 잡고 있으므로, 가이딩 장치를 다시 잡으면 바로 HGC 재개 가능
단, 손을 뗀 뒤 로봇이 스스로 움직이는 것(제어 오류 등)이 감지되면 감시정지 기능이 동작하여 정지 분류 0 또는 1로 전환 - SSM 중 작업자 근접 시 — 안전 거리 이하로 접근하면 속도를 0으로 줄이고 그 자리에서 전원을 유지한 채 대기하다가, 작업자가 센서 감지 영역을 이탈하면 자동 재기동
단, 대기 중 제어 오류 또는 진동 등으로 로봇이 설정 범위를 벗어나 움직이면 감시정지 기능이 동작하여 정지 분류 0/1로 전환
③ 감속 (Reduced-Speed, 3.1.8.6) — 신설
감속(reduced-speed)이란?
수동 모드에서 작업자가 로봇과 같은 공간에 있을 때 적용되는 TCP 속도 250 mm/s 이하 제한을 뜻합니다.
250mm/s 라는 속도는 산업용 로봇 표준에서 오랫동안 써온 관행적 기준값이었지만, ISO 10218-1 및 ISO 10218-2 개정판에서 처음으로 독립 용어로 정의되어 표준 전반에 적용됩니다.
이 속도를 초과해야 하는 경우에는 프로그램 검증 등 특정 목적에 한하며, 이때는 별도 안전 조건을 갖춘 고속 수동 모드(5.7.2.3.3) 요구 사항을 적용해야 합니다.
④ 부가축(Additional Axis, 5.2.9) — 신설
개정판 5.2.9절에 로봇에 연결된 부가축(예: 리프트, 레일, 포지셔너 등)에 관한 요구사항이 별도로 신설되었습니다.
📌 부가축 핵심 요구사항 3가지
- 관련 절 준수: 5.2.1(재료·강도), 5.2.2(기계설계), 5.2.8(위치유지), 5.5(안전기능), 5.6(정지), 5.7(제어)을 부가축에도 동일하게 적용
- 감속 적용: 부가축 동작이 수동 감속 모드에서 TCP 속도에 영향을 줄 수 있는 경우, 감속 요구사항(5.5.6.1)을 부가축에도 적용해야 함
- 동조 부가축 속도 차이 방호: 여러 부가축이 동조되어 동작할 때 축간 속도 차이로 발생하는 위험으로부터 작업자를 보호하는 방호조치 또는 안전기능 구현 필요
⚠️ 부가축의 보정 또는 분리 동작 시 특별 규칙
- 고속 수동 모드(5.7.2.3.3) 사용 가능: 부가축의 보정·분리 동작에 한해 감시속도 파라미터를 설정하여 고속 수동 모드를 사용할 수 있음
- 부가축이 감속보다 빠르게 동작하는 경우: 다른 축(로봇 본체)은 자동 운전 불가 — 부가축의 고속 동작 중 로봇 자동 운전이 동시에 진행되는 상황을 방지
⚠️ 핵심 요구사항 - 로봇 베이스에 부가축을 설치 했다면?
① 자동모드 상태에서, 방호장치 (펜스, 센서) 혹은 PFL을 통해 안전이 검증되었다면, 부가축과 로봇의 동시 동작 및 속도 제한 관련 요구사항은 별도로 없음
② 수동모드 상태에서, 로봇이 움직일 때 부가축도 같이 움직여서 속도를 보탠다면, "로봇 자체 속도 + 부가축 속도"를 합친 최종 TCP 속도가 250 mm/s 이하가 되도록 제어해야 함
4. 개정 항목 상세 비교
각 조항이 구버전 대비 어떻게 바뀌었는지 표 형태로 비교하였으며, 색상 기호로 변경 유형을 구분했습니다.
구조 변경 (1~7절)
| 절 | 유형 | 구버전 | 개정판 |
|---|---|---|---|
| 1절 | 변경 | 적용범위 산업용 로봇 시스템 통합과 셀 적용 제외 미명시 | 적용범위 산업용 로봇 응용과 로봇 셀로 명칭·초점 조정 적용 제외 분야 11개 명시(수중, 의료, 군사 등) 위험요인 다루지 않는 위험요인 13개 명시 |
| 2절 | 강화 | 인용표준 약 20개 | 인용표준 약 40개 ISO 14119:2024, KS B ISO 13849-1:2023 등 최신판으로 갱신 |
| 3절 | 강화 | 용어·정의 15개 약어표 없음 | 제목이 용어, 정의 및 약어로 확장 3.1 용어·정의 78개(12개 그룹) 3.2 약어 및 기호(3.2) 신설 |
| 4절 | 변경 | 제목: 위험원 식별과 위험도 평가 4.2 배치 설계 ~ 4.5 위험 감소까지 세부 절 구성 | 제목: 위험성 평가로 재정의 4.1 일반사항 — KS B ISO 12100 적용 명시 4.2 로봇 응용·로봇 셀 특성(22가지 작업 유형) 4.3 협동 응용의 특성 (신설) |
| 5절 | 강화 | 안전 요구사항 및 보호대책 12개 항 (5.1~5.12) | 안전 요구사항 및 위험성 감소 대책 16개 항 (5.1~5.16) 5.2 설계, 5.5 안전기능, 5.6 정지, 5.7 제어, 5.8 방호, 5.9 말단장치, 5.14 협동응용 등 전면 재편 |
| 6절 | 변경 | 안전 요구사항·보호대책에 대한 확인 및 검증 확인수단 상세 표: 부속서 G(규정) | 제목: 검증 및 확인 6.3.3 PFL 생체역학적 제한값 검증 신설 확인수단 표는 부속서 H(참고)로 이동 |
| 7절 | 강화 | 구성: 7.1~7.3 7.2 지침 안내서 10개 항, 7.3 표식 | 구성: 7.1~7.5 7.2 신호·경고장치, 7.3 표시, 7.4 표지·경고 문구(신설) 7.5 지침서 23개 항 (7.5.1~7.5.23) — 사이버보안(7.5.23), 기능안전정보(7.5.16) 등 신설 |
용어 및 정의 주요 변경 (3절)
| 용어 | 유형 | 개정판 대응 용어/조항 | 변경 내용 |
|---|---|---|---|
| 협동 로봇 (collaborative robot) |
삭제 | 용어 삭제 → '협동 응용(3.1.1.6)' 및 '협동 작업(3.1.1.7)'으로 대체 | ★ 가장 중요한 변화 — 로봇 자체가 아닌 응용이 협동 여부를 결정함을 명확히 함 |
| 로봇 응용 (robot application) |
신설 | 구버전 "로봇 시스템(로봇+말단장치+센서)"보다 넓은 개념 작업 대상물의 형태·위험성, 로봇 동작 프로그램, 함께 쓰는 기계까지 포함한 하나의 완성된 기계 단위로 정의 | ★ 개정판의 핵심 단위 개념 → 위험성 평가, 안전 설계의 기본 단위 |
| 통합자 (integrator) |
강화 | 개정판에서 통합자(SI)는 단순 설치업자가 아닌, 로봇 응용 또는 로봇 셀의 제조자로 간주될 수 있음을 명시 (3.1.7.2) 법적·안전 책임이 강화되는 근거 | '제조자'로 간주될 수 있다는 지위를 명확화 |
| 이격거리 (separation distance) |
신설 | 작업자와 로봇의 움직이는 부분 사이에 항상 유지해야 하는 최소 안전 거리. SSM에서 실시간으로 계산하여 이 거리 이하로 좁혀지면 로봇을 감속·정지 | ★ SSM의 핵심 개념: 작업자와 로봇 사이에 항상 일정 거리 이상을 유지하는 안전기능. 이 거리를 부속서 L 공식으로 계산 |
| 준정적 접촉 (quasi-static contact) |
신설 | 신체 일부가 로봇 응용의 움직이는 부분과 다른 고정/움직이는 부분 사이에 끼일 수 있는 접촉 상황 | ★ PFL 핵심 개념 1: 끼임이 발생하는 접촉이므로 더 엄격한 허용값 적용 Fmax = 신체 부위별 최대 허용 힘(N), Pmax = 최대 허용 압력(N/cm²) |
| 동적 접촉 (transient contact) |
신설 | 신체 일부가 끼이지 않고, 로봇 응용의 움직이는 부분으로부터 물러서거나 반사적으로 움츠릴 수 있는 순간적 접촉 | ★ PFL 핵심 개념 2: 끼임 없이 튕겨나가는 접촉이므로 상대적으로 높은 허용값 적용 동적 접촉 허용 힘과 압력 = 준정적 허용값의 2배를 사용 |
| 감시 정지 (monitored-standstill) |
신설 | 전원을 끄지 않은 채 로봇이 멈춰 있는 상태(정지 분류 2)에서 실제로 움직이지 않는지 지속 감시하는 안전기능. 이상 감지 시 즉시 완전 정지로 전환 | 정지 분류 2 사용 시 필수 → 5.6.3 c), 5.5.8 |
| 영역(space) 3종 | 강화 | 3.1.9 영역·구역 및 거리(10개로 확장) · 위험구역, 작업구역, 감지구역, 이격거리 신설 | 4개이던 공간 개념이 10개로 세분화 특히 작업자 감지를 위한 감지구역(SPE)과 SSM에서 쓰는 이격거리 개념이 새로 정의됨 |
| 협동 영역 (collaborative workspace) |
삭제 | 별도 용어 삭제 → 방호영역(3.1.9.6) + 협동 작업(3.1.1.7)으로 개념 흡수 | 별도 용어를 없애고 "방호영역 안에서 이루어지는 협동 작업"으로 표현 방식을 통일 더 직관적인 구조 |
| 산업용 로봇 라인 (industrial robot line) |
삭제 | 용어 삭제 | 여러 로봇 시스템이 연결된 라인 개념 — 개정판에서는 "로봇 셀"로 통합되어 별도 정의 불필요 |
안전 요구사항 세부 비교 (5절)
| 조항 | 유형 | 구버전 | 개정판 |
|---|---|---|---|
| 5.2 설계 | 강화 | 안전 관련 제어 시스템 성능: PL d / SIL 2 고정 | 5.2.1~5.2.16으로 전면 재편 재료·강도·기계설계, 리프팅/이동, 유해물질, 안정성, 온도·화재, 특수장비 포함 동력상실, 오작동, 위험 에너지, 전기·공압·유압, TCP(공구 중심점)/가반하중 설정 포함 사이버보안 항목 신설 |
| 5.2.9 부가축 | 신설 | 부가축 독립 요구사항 없음 — 일반 설계 요구사항 내 포함 | 부가축 요구사항 독립 신설 (베이스 리프트, 레일, 포지셔너 등) 관련 절(5.2.1·5.2.2·5.2.8·5.5·5.6·5.7) 동일 적용 의무 감속 수동 모드에서 TCP 속도에 영향 시 감속 요구사항(5.5.6.1) 부가축에도 적용 동조 부가축 간 속도 차이로 인한 위험 — 방호조치 또는 안전기능 구현 의무 부가축이 감속보다 빠르게 동작 시 → 다른 축(로봇 본체) 자동 운전 불가 |
| 5.2.16 사이버 보안 | 신설 | 해당 조항 없음 | 사이버 보안 요구사항 신설 사이버 보안 위협 평가 수행 의무화 위협 발생 시 무단 접근 방지 조치 요구 |
| 5.5 안전기능 | 신설 | 배치 관련 내용 중심(경계 방호, 접근, 부품 처리, 프로세스 관찰) | 기능 안전 핵심 절로 신설 (5.5.1~5.5.10) 성능 요구사항: PLr/SIL 결정, 고장·결함 감지, 속도 제한 감시 파라미터 설정 보안, 기동/재기동 연동·리셋, 감시 정지, 통신 보안, 전자기 요구사항 신설 |
| 5.5.5 안전기능의 파라미터 설정 | 신설 | 규정 없음 | 안전기능 파라미터 보안 신설 안전 관련 파라미터는 권한 인원만 변경 가능, 변경 후에는 초기화 필요 체크섬 기반 변경 이력 관리, 자동 운전 중에는 수정 불가 |
| 5.5.8 · 감시 정지 | 신설 | '안전 정격 감시 정지'로 일부 언급(협동 운전 절 내) 독립 안전기능 아님, 구현 기준 없음 | 감시 정지 안전기능으로 독립 신설 정지 위치 감시·유지, 의도치 않은 동작 시 범주 0/1 정지 보호정지 분류 2 사용 시 반드시 구현해야 하는 필수 기능 → 상세 설명: 섹션 3. 정지 기능 체계의 재편 |
| 5.6 정지 | 강화 | 자동/수동 모드, 원격 접근 중심 정지 분류 0 또는 1, PL d 이상 | 정지 체계 전면 재편 (5.6.1~5.6.5) 비상정지, 보호정지, 관련 장비 정지 체계 명확화 5.6.4 정상정지 신설 |
| 5.6.4 · 정상정지 | 신설 | 별도 규정 없음 일상적인 정지에 대한 공식 정의 없어, 비상정지 오용 관행 발생 | 정상정지 독립 신설 분류 0/1, 최소 PL b, 위험 기능 정지 후 구동기 에너지 제거 비상정지 장치를 정상정지 용도로 사용 불가 (명시적 금지) → 상세 설명: 섹션 3. 정지 기능 체계의 재편 |
| 5.7 제어기능 | 강화 | 교시 상자 일반, 무선/분리형, 동시동작, 핸드가이딩 중심 | 5.7.1~5.7.9로 세분화 모드, 예기치 않은 기동 방지, 상태표시/경고, 단일 제어점, 지역/원격제어 포함 허가장치, 제어 스테이션, 동시동작 요건 명확화 |
| 5.7.2.3.3 · 고속 수동 모드 | 강화 | 프로그램 검증 목적 수동 고속, 250 mm/s 초과 가능 | 선택사항으로 명확히 규정 감시속도 안전기능(5.5.6.2) 필수 티치 펜던트 동작 허가장치 통합, 방호조치는 자동 모드와 동일 부가축 보정·분리 동작 시에도 적용 가능 — 감시속도 파라미터 설정 후 사용 |
| 5.8 방호설비 | 강화 | 유지보수 안전 보호, 접근 지점, 인접 셀 보호 | 5.8.1~5.8.10으로 확장 방호영역, 경계 방호조치, 가드, SPE, 뮤팅/무효화, 최소거리 체계화 5.8.10 예기치 않은 재기동 방지 신설 |
| 5.8.10 재기동 방지 |
신설 | 5.6.3.4 / 5.10.5.2에서 간략 언급(재기동 연동·유무 감지) | 독립 항목으로 신설 — 방호영역 내 사람 유무를 확인하지 않고 재기동하는 사고 방지 목적 재기동 전 방호영역 내 사람 여부를 육안 또는 감지 장치로 확인해야 함 확인이 불가한 구조라면 순차 리셋 또는 4가지 대안 조치 중 하나 적용 |
| 5.9 말단장치 | 신설 | 5.3.10에서 짧게 언급, 별도 세부 기준 없음 | 말단장치 요구사항 전면 신설 — 협동 응용에서 작업자와 직접 접촉하는 부품으로 별도 규정 필요성 증가 형상·표면 처리: 날카로운 모서리 금지, 충격 흡수 재질 적용 전원 차단 시에도 끼인 신체를 수동으로 해제할 수 있는 수단 의무화 5.9.6 말단장치 교환 시스템 — 그리퍼 교체 시 잘못된 조합 방지 체계 포함 |
| 5.10 수직이송 | 신설 | 안전 보호장치 중심(방호벽, 최소거리, ESPE, 수동 스테이션, 뮤팅) | 수직 이송 구성요소 독립 절 신설 5.10.1 기계적 설계, 5.10.2 보호 조치 |
| 5.11 레이저 | 신설 | 구버전에는 레이저 장비에 대한 독립 절 없음 — 일반 설계 요구사항 내 포함 간주 ※ 구버전 5.11은 협동 로봇 운전(HGC, SSM, PFL)을 다루던 절로, 개정판에서 5.14로 이동·재편됨 | 레이저 및 레이저 장비 절로 신설 KS C IEC 60825-1:2014 준수 요구 |
| 5.12 자재취급 | 변경 | 구버전 5.12: 시운전 | 자재취급 중심으로 변경 5.12.1 자재 취급, 5.12.2 수동 이적재 스테이션, 5.12.3 자재 흐름 |
| 5.13 인접 셀 | 신설 | 해당 없음 | 인접한 로봇 셀 독립 절 신설 구버전 5.10.8 내용을 독립 절로 격상 |
| 5.14 협동응용 | 신설 | 해당 없음 | ★ 협동 응용 핵심 절 신설 ★ 5.14.1 일반, 5.14.2 방호영역, 5.14.3 전환 5.14.4 HGC, 5.14.5 SSM, 5.14.6 PFL |
| 5.15 시운전 | 신설 | 해당 없음 | 조립·설치·시운전 절 신설 5.15.1 시운전, 5.15.2 환경 조건, 5.15.3 전원, 5.15.4 조명 |
| 5.16 유지보수 | 신설 | 해당 없음 | 유지보수 절 신설 5.16.1 일반, 5.16.2 무동력 동작 |
부속서 비교 (규정 / 참고)
규정(Normative)은 반드시 지켜야 하는 필수 요구사항이며, 참고(Informative)는 권장 사항 또는 참고 자료 수준의 부속서를 뜻합니다.
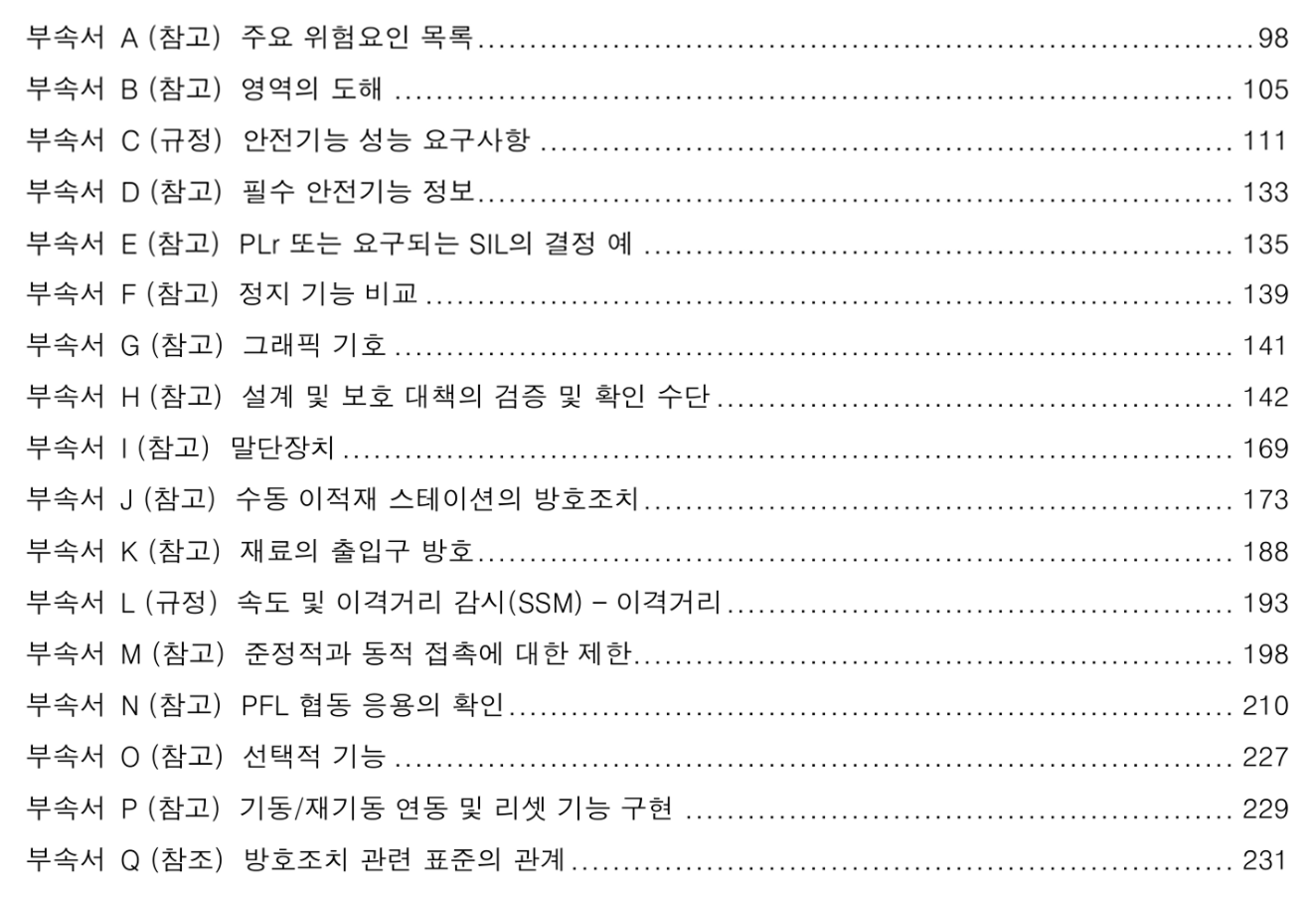
| 부속서 | 유형 | 내용 요약 |
|---|---|---|
| A 주요 위험요인 목록 |
규정→참고 | 위상 강등 — 의무성 표현이 '규정'에서 '참고'로 전환 |
| B 영역의 도해 |
참고 | 최대/제한/운전/방호/협동영역 개념을 도해도로 표현 |
| C 안전기능 성능 요구사항 |
규정 | C.1 안전기능 성능 수준 결정 + 표 C.1(안전기능별 트리거·의도된 결과·기본 PLr/SIL), C.2 위험성 추정 파라미터 |
| D 필수 안전기능 정보 |
참고 | 표 D.1 양식 — 안전기능별 명칭·작동 모드·트리거·의도된 결과·PL/SIL 등 기재 방법 안내 |
| E PLr·SIL 결정 예시 |
참고 | 3가지 방법론(ISO 12100 / IEC 62061 / RIA TR R15.306)별 PLr·SIL 산정 예시 및 용어 비교표 |
| F 정지기능 비교 |
참고 | 표 F.1 — 비상·보호·정상정지 등 6가지 정지 기능의 목적·정지 카테고리·리셋 조건 비교 |
| G 그래픽 기호 |
참고 | 비상정지, 자동/수동 모드 등 그래픽 기호 지침 |
| H 안전 요구사항 확인 수단 |
규정→참고 | Clause 5 전체 요구사항에 대한 검증·유효성 확인 방법을 조항별로 상세 나열(표 H.1, 10가지 방법) — 구버전 부속서 G에서 이동 |
| I 말단장치 |
참고 | 파지형·진공형·자석형 유형별 설계 고려사항, 안전 기능(파지 유지·해제 등), 협동 적용 예시 |
| J 수동 이적재 스테이션 방호 |
참고 | 그림 J.1~J.9 — 접근 방지·방해장치 높이 요구사항·존재 감지·침입 감지·다중 구역 시퀀싱 |
| K 재료의 출입구 방호 |
참고 | 자재 출입 지점 방호 — 소형 개구부(≤180 mm)·터널·ESPE(라이트커튼/레이저스캐너) 방법(그림 K.1~K.4) |
| L SSM 이격거리 |
규정 | 이격거리 계산 공식(Sp = Sh + Sr + Ss + C + Zd + Zr) 및 변수별 계산 방법 |
| M 준정적·동적 접촉 제한값 |
참고 | 29개 신체 영역별 준정적·과도 접촉 힘·압력 한계값(표 M.2), 유효 질량·스프링 상수(표 M.3), 에너지 전달 한계(표 M.4) |
| N PFL 협동 응용 확인 |
참고 | PFL 검증 방법론 — PFMD 사양·교정, 접촉 유형별 측정 절차(Figure N.4), 측정값 분석·재검증 |
| O 선택적 기능 |
참고 | 최소 요구사항 이상의 선택적 기능 — 비상정지 출력·충돌 감지·경로 정확도·감시 위치·정지 성능 모니터링 등 |
| P 기동/재기동 연동 및 리셋 |
참고 | 에너지 복구·모드 변경·정지 후 예기치 않은 시작 방지 인터록 + 리셋 절차(그림 P.1) |
| Q 방호조치 관련 표준의 관계 |
참고 | 방호장치 관련 표준(ISO 13849, ISO 14119, ISO 14120, IEC 61496 등) 간 체계적 관계 도표 |
5. ISO TS 15066 표준의 통합(HGC / SSM / PFL)
기존에는 협동 응용 안전 요구사항을 ISO/TS 15066 표준에서 별도로 확인해야 했습니다. 개정판에서는 그 내용이 KS B ISO 10218-2 본문과 부속서(L, M, N)로 통합되어, HGC·SSM·PFL 각각의 계산 방법, 허용값, 검증 절차가 처음으로 이 표준 안에서 직접 규정됩니다.
작업자가 직접 로봇 암을 손으로 안내하는 방식
개정판(5.14.4)에서 가이딩 장치 설계 및 사용에 관한 상세 요구사항이 규정됨
작업자와 로봇 간 거리를 실시간 감지하여 이격거리를 동적으로 유지
개정판(5.14.5 + 부속서 L)에서 이격거리 계산 공식이 규정(Normative)으로 신설됨
충돌 시 발생하는 힘·압력이 신체 부위별 허용치를 넘지 않도록 검증
개정판(5.14.6 + 부속서 M, N)에서 준정적·동적 접촉 구분 및 허용값이 규정됨
SSM 이격거리 계산 공식 (부속서 L — 규정)
| 변수 | 의미 | 계산식 |
|---|---|---|
| Sh | 작업자의 위치 변화로 인한 기여분 | ∫(t0 → t0+Tr+Ts) vh(t) dt 또는, 1.6 × (Tr + Ts) |
| Sr | 로봇 응용 반응시간에 기인한 기여분 (센서 반응시간 등) | vr × Tr |
| Ss | 로봇 응용이 정지할 때까지 발생하는 기여분 | ∫(t0+Tr → t0+Tr+Ts) vs(t) dt |
| C | 침입거리 — 감지 영역 너머로 신체가 침투할 수 있는 거리 (ISO 13855 기반) | 방호장치 사양 및 ISO 13855에 따름 |
| Zd | 작업자 위치 불확실성 — 작업자 감지 센서(PSD, Presence Sensing Device)의 측정 오차 범위 | 방호장치 사양(제조사 스펙 시트)에 따름 |
| Zr | 로봇 응용의 위치 불확실성 | 로봇 사양(제조사 스펙 시트)에 따름 |
PFL 허용값 및 확인 방법 (부속서 M, N)
★ PFL 검증 실무 요구 조건
이 페이지에서는 표준 요구사항을 중심으로 정리했습니다. 실제 검증 절차가 궁금하다면 아래 내용을 확인하시기 바랍니다.
Insight — 로봇 시스템 위험성 평가 가이드 · 5. PFL 검증을 위한 요구 조건 →
접촉 유형 구분
준정적 접촉 (quasi-static)
신체 일부가 로봇 응용의 움직이는 부분과 고정된 부분 사이에 끼일 수 있는 상황 → 더 엄격한 허용값 적용
동적 접촉 (transient)
신체 일부가 끼이지 않고, 충돌 이후에 로봇 응용의 움직이는 부분으로부터 멀어지는 순간적 접촉 → 높은 허용값 허용 (준정적 접촉 허용치의 약 2배를 적용)

협동 응용 위험성 평가 프로세스
어느 신체 부위가 노출되는가? / 로봇과의 접촉이 의도된 상황의 일부인가, 혹은 합리적으로 예측 가능한 위험 상황인가?
어떤 허용값을 적용할 것인가?
• 끼임 발생 가능 → 더 엄격한 값 (준정적 접촉 기준)
• 부딪히고 튕겨남 → 상대적으로 완화된 값 (동적 접촉 기준)
실제 충돌 상황을 재현해 측정 장비(PFMD)로 힘·압력을 측정하거나, 컴퓨터 시뮬레이션으로 계산. 개정판에서는 시뮬레이션도 공식 검증 수단으로 인정됨
측정·계산된 수치를 부속서 M의 신체 부위별 허용값과 비교
① 속도 최적화 (PFL + 감속 안전기능)
② 말단장치 형상 개선 (모따기, 모서리 부분에 고무 재질의 커버 등을 부착)
③ SSM 적용 (접촉하기 전에 센서로 로봇 정지)
④ 레이아웃 변경 (접촉 빈도 자체를 줄이거나, 접촉 가능한 신체 부위를 허용치가 높은 부위만 충돌하도록 제한)
6. 로봇 사용 기업(End-User)이 알아야 할 핵심 내용
개정판에서 로봇 사용 기업이 직접 영향을 받는 항목들입니다. '로봇 도입 시 반드시 확인해야 할 것'을 중심으로 정리하였습니다.
⚠️ 중요: 위험성 평가 단위 변경
구버전에서는 로봇을 위주로 위험성을 평가했으나, 개정판에서는 '로봇 응용' 및 '로봇 셀'(= 로봇 시스템 + 작업물 + 작업 프로그램 + 로봇과 연계된 자동화 기계·장비)을 단위로 평가할 것을 명시합니다.
기존에 설치한 로봇 셀이 있다면, 해당 셀에 대한 위험성 평가가 변경된 표준을 충족하는지 재검토하는 것이 권장됩니다.
① 위험성 평가 체계 재검토
기존 위험성 평가가 '로봇 시스템' 단위인 경우, 작업물·작업 프로그램·관련 기계를 포함한 '로봇 응용' 또는 '로봇 셀' 단위로 재평가 필요
4절 4.1구버전의 10가지에서 22가지로 확장된 작업 유형 목록(시운전, 방호영역 출입, 응용 변경, 재배치, 폐기 등)을 모두 검토했는지 확인
4절 4.2 e)개정판 표준과 산업안전보건법 모두 작업자 참여를 명시.
실제 로봇 옆에서 일하는 운전자·유지보수 담당자 등이 위험성 평가 과정에 참여했는지 확인하고, 참여 기록을 남겨둘 것
KS B ISO 10218-2:2025는 방법론으로 KS B ISO 12100(기계류 일반 안전 원칙)을 명시적으로 요구. 보고서에 적용 표준을 기재해야 감사·인증 시 근거가 됨
4절 4.1② 로봇을 협동 응용(PFL/SSM/HGC)관련 핵심 내용
협동 작업 중 발생 가능한 모든 접촉을 준정적 접촉(끼임/협착)과 동적 접촉(충돌 후 밀려남)으로 분류 — 유형에 따라 적용 허용값이 달라짐
4.3.2 · 부속서 M부속서 M의 신체 부위별 허용값(표 M.2)과 현장 측정값을 비교. 충돌 시 힘/압력이 허용치를 초과하지 않는지 PFMD(측정장비) 또는 컴퓨터 시뮬레이션으로 확인
5.14.6 · 부속서 M, N안전 거리를 공식(Sp = Sh + Sr + Ss + C + Zd + Zr)으로 산출. 기존에 경험적으로 설정한 거리가 있다면 로봇 속도와 센서 오차 범위를 반영해 재검토 필요
5.14.5 · 부속서 L로봇 시스템 매뉴얼과 작업 지침서 등에 협동 안전기능 유형(HGC/SSM/PFL), 이격거리(SSM), 허용 힘/압력 값(PFL) 등을 포함
7.5.22③ 사이버 보안 및 안전기능 관리
로봇 제어 시스템의 사이버 보안 위협 평가(5.2.16) 수행. 네트워크 연결 여부, 원격 접근 기능 등을 점검
5.2.16 신설안전기능 파라미터를 변경할 수 있는 인원 및 권한을 명확히 정의. 변경 이력을 관리하고, 변경 후 초기화 절차를 수립
5.5.5 신설방호영역 내 모든 위치를 가시적으로 확인 가능한지 검토. 불가능한 경우 존재 감지 장치(방호센서) 또는 순차 리셋 장치 설치, 또는 4가지 대안 조치 적용 여부를 결정
5.8.10 신설비상정지, 보호정지, 정상정지가 명확히 구분되어 있는지 확인. 특히 비상정지 장치가 정상정지 장치로 사용되고 있는지 점검
(*개정판에서는 비상정지 장치를 정상정지 장치로 사용하는 것이 금지됨)
End-User 실무 체크리스트
📋 위험성 평가
- 위험성 평가 단위가 '로봇 응용' 또는 '로봇 셀'로 설정되었는지 점검
- 위험성 평가 시, 현장 작업자가 반드시 참여
🤝 협동 응용 (PFL / SSM)
- 협동 응용 시 사건이 발생할 수 있는 기준(충돌 신체 부위, 발생 원인, 발생 확률, 충돌 유형)으로 위험성 평가 수행
- 이때, 충돌 유형 - 준정적 접촉(끼임) / 동적 접촉(충돌 후 밀려남)을 반드시 구분
🛡️ 보안 / 정지 기능
- 사이버 보안 평가를 지속적으로 수행하고, 내부적인 관리 체계 수립
- 네트워크 연결 시 안전기능 데이터 통신 보안 요구사항(5.5.9) 검토
- 비상정지 장치를 정상정지 용도로 사용하지 않는지 점검
📄 문서화
- 사이버 보안 관련 정보와 협동 응용 정보(HGC/SSM/PFL) 관련 내용을 사용 정보에 포함
- 위험성 평가를 주기적으로 실시하여 평가 일자와 변경 사항을 최신화 하고, 해당 내용을 바탕으로 작업자 안전교육 실시
- 현장 작업자를 포함하여 위험성 평가에 참여한 인원을 반드시 평가자 명단에 기록
7. SI(System Integrator)가 알아야 할 핵심 내용
로봇 셀 설치 단계별 핵심 대응 항목을 정리했습니다.
위험성 평가
- 평가 단위를 '로봇 응용' 또는 '로봇 셀'로 설정 — 작업물·작업 프로그램·관련 기계 포함
- 22가지 작업 유형(4.2) 전체에 대해 위험성 평가 수행
- 협동 응용 시 레이아웃 요구사항(5.4.4) 적용
기능 안전
- 각 안전기능의 PLr 또는 SIL을 부속서 C 표 C.1에서 선택하거나, 부속서 D의 노출 빈도 / 심각성 / 발생 가능성 / 회피 가능성 파라미터를 활용하여 결정
- PL d 요구 시: 이중 채널(Category 3) 또는 PFH < 4.43×10⁻⁷/h 달성
- 안전기능 파라미터 보안 체계(5.5.5) — 접근 권한, 변경 이력, 재초기화
부가축(5.2.9)
- 5.2.1·5.2.2·5.2.8·5.5·5.6·5.7 요구사항을 부가축에도 동일 적용
- 수동 감속 모드에서 부가축이 TCP 속도에 영향 → 감속 요구사항(5.5.6.1) 적용
- 동조 부가축 간 속도 차이에 대한 방호조치 구현
기타
- 말단장치(5.9) — 형상·표면, 힘 감지, 파지력, 교환 시스템
- 사이버 보안 위협 평가(5.2.16) 및 무단 접근 방지
- 수직 이송 구성요소(5.10) 설계 기준 검토
- 시운전 계획 수립 및 절차 문서화(5.15)
- 비상정지·보호정지·정상정지 3가지 정지 체계 구현 확인
- 예기치 않은 재기동 방지 조치(5.8.10) 적용 확인
- 고속 수동 모드 시 감시속도 안전기능(5.5.6.2) 구현
- 원격 접근 시 원격 제어 요구사항(5.7.6.3) 충족
- 뮤팅(Muting) 기능 — IEC 62046:2018 준수
- 수동 이적재 스테이션(5.12.2) 방호 적용
- 인접 로봇 셀(5.13) 안전 요구사항 적용
검증
- PFL — PFMD 측정 또는 시뮬레이션으로 힘·압력 검증
- SSM — 부속서 L 공식으로 이격거리(Sp) 계산·검증
문서화 (7.5절 23개 항목)
- 안전기능 정보(7.5.16) — 종류, PLr/SIL, PFH, 구조 등
- 협동 응용 정보(7.5.22) — HGC/SSM/PFL 관련
- 말단장치(7.5.20), 제한 영역(7.5.13), 사이버 보안(7.5.23)
- 23개 항목(7.5.1~7.5.23) 지침서 작성 완료 여부 확인
기능 안전(Functional Safety) — PLr/SIL 결정 방법 2가지
경로 ① 표 C.1에서 직접 선택 (간편)
- 적용한 안전기능이 표 C.1에 있는지 확인
- 해당 안전기능의 기본 PLr/SIL 선택
- 도출된 PLr/SIL을 달성하는 SRP/CS 설계
경로 ② 위험성 평가로 개별 산출 (정밀)
- 심각성(Se), 노출 빈도·시간(Fr)
- 위험 사건 발생 확률(Pr), 회피 가능성(Av)
- 부상 발생 가능성(DL) — ★ 개정판 신규 파라미터
| 항목 | Category 3 + PL d | Category 2 + PL d | PFH 직접 달성 |
|---|---|---|---|
| 구조 | 이중 채널 + 교차 모니터링 — 단일 고장 시에도 기능 유지 | 단일 채널 + 테스트 채널 — DC 높아야 함 | 구조 무관, PFH 계산으로 직접 달성 |
| 개정판 허용 조건 | 항상 허용 | DCavg > 90% & MTTFD > 62년 | PFH < 4.43×10⁻⁷/h |
| 구버전 | 허용 (유일한 방법) | 명시 없음 | 명시 없음 |
SI 실무 체크리스트
🛠️ 기능 안전 / 안전기능
- 각 안전기능의 PLr/SIL을 부속서 C 에서 선택하거나, 위험성 평가로 결정
- PL d 요구 안전기능 — Category 3 또는 PFH < 4.43×10⁻⁷/h 달성 확인
- Category 2로 PL d 달성 시 — DCavg > 90% & MTTFD > 62년 충족 확인
- 보호정지에 정지 분류 2 사용 시 — 감시 정지 안전기능 구현
- 안전기능 파라미터는 권한 부여 받은자만 수정 가능, 체크섬 기능과 설정 변경 후에는 재시작 필요하도록 구성
- 안전기능에 데이터 통신 사용 시 - IEC 61508-2 7.4.11 적용
🤝 협동 응용 / 말단장치
- '협동 응용'·'협동 작업' 개념으로 협동 여부 판단 ('협동 로봇' 용어 사용 ✖)
- PFL 적용 시? — 충돌 힘·압력을 측정/계산 후 부속서 M·N 허용치와 비교
- SSM 적용 시? — 부속서 L 공식(Sp = Sh + Sr + Ss + C + Zd + Zr)으로 이격거리 산출
- HGC 적용 시? — 가이딩 장치 설계 요구사항(5.14.4) 충족 여부 확인
- 말단장치는 끼임 방지를 위해 전원이 공급되지 않아도 수동으로 해제할 수 있는 장치를 확보하고, 경량화 및 날카로운 모서리는 부드럽게 가공하거나 충격 흡수 재질을 적용
⚙️ 설비 / 제어
- 고속 수동 모드 — 감시속도(5.5.6.2) 구현 + 티치 펜던트에 동작 허가장치 통합
- 원격 제어 — 원격 모드 변경 시 현장 수동 확인 기능 구현
- 부가축 — 수동 감속 모드에서 TCP 속도 영향 시 감속 요구사항(5.5.6.1) 적용
- 부가축이 고속으로 동작하는 구간에서는 로봇 본체의 자동 운전을 차단하도록 설계
📋 문서화
- 시운전 계획과 사용 매뉴얼 / 유지보수 절차 문서화
- 기능 안전(Functional Safety) 정보 명시 — 로봇 응용에 적용된 안전 기능의 종류와, 각 안전 기능의 PLr/SIL·PFH·구조 등을 문서화
8. End-User & SI 공통 핵심 포인트
작업물·작업 프로그램·관련 기계 전체를 포함해 평가. 기존 위험성 평가 보고서의 평가 단위를 반드시 점검
HGC·SSM·PFL의 검증/확인 방법과 허용값이 ISO 10218-2 표준 본문에 직접 규정
부속서 C 기준으로 개별 결정. Category 2로도 PL d 달성 가능
보안 위협이 안전 위험을 초래하면 무단 접근 방지 조치 적용, 사용 정보에 보안 정보 포함
일상 루틴 정지를 정상정지(5.6.4)로 공식화. 비상정지 장치의 정상정지 용도 사용 금지
보호정지에 정지 분류 2 적용하는 모든 로봇 응용에서 감시 정지 필수
동일한 로봇이 협동 응용에도, 비협동 응용에도 사용될 수 있습니다. 검증과 확인의 대상은 로봇 자체가 아닌 응용(application)입니다. '협동 로봇'이라는 표현은 삭제되고, '협동 응용'·'협동 작업' 개념으로 대체됩니다.
추가 확인 필요 사항
핵심 변경사항 외에 실무 적용 시 반드시 확인해야 할 항목들을 정리했습니다.
📌 ① 표준 명칭 변경
구버전 국문 표준명 "로봇 및 로봇 장치 — 산업용 로봇의 안전에 관한 요구사항 — 제2부: 로봇 시스템 및 통합"이 개정판에서 "로봇 — 안전 요구사항 — 제2부: 산업용 로봇 응용 및 로봇 셀"로 변경되었습니다. 문서·인증 등에서 표준 명칭 표기 시 이를 반드시 반영해야 합니다.
👥 ② 이해관계자 명시 확대 (1절)
구버전에서는 '통합자'와 '사용자'만 간략히 언급되었습니다. 개정판에서는 로봇 제조업체, 통합자, 보건·안전기관, 사용자, 근로자(작업자), 서비스 제공자를 명시적으로 표준의 이해관계자로 포함하였습니다. 개정된 산업안전보건법뿐만 아니라, 이제는 국제/국내 표준에서도 위험성 평가 시 작업자의 참여를 요구합니다.
🗺️ ③ 협동 응용 레이아웃 — 비협동 인원 동선 고려 (4.2 f) 신설)
개정판 4.2 f)항에서 "협동 응용과 관련되지 않은 작업자의 이동 경로가 협동 응용의 방호영역을 통과할 수 있으므로, 레이아웃 설계 시 이를 추가로 고려해야 한다"는 요구사항이 신설되었습니다.
이제 협동 응용 설계 시 해당 작업에 직접 참여하지 않는 인원(인근 작업자, 단순 통행자 등)의 동선까지 위험성 평가 범위에 포함해야 합니다.
📡 ④ 안전기능 데이터 통신 요구사항 (5.5.9 신설)
로봇의 안전기능을 네트워크로 구현하는 경우, 해당 네트워크의 보안 수준에 따라 필요한 대책이 달라집니다(IEC 61508-2 7.4.11).
- 범주 1 — 전용 폐쇄망: 로봇 전용 안전 필드버스처럼 외부와 완전히 분리된 네트워크. 보안 위협이 가장 낮아 기본 대책만으로 충분
- 범주 2 — 공장 내부망: 공장 내부 LAN 등 외부 접근은 제한적이지만, 여러 장비가 공유하는 네트워크. 중간 수준의 보안 대책 필요
- 범주 3 — 외부 연결망: 인터넷과 연결되거나 외부에서 접속 가능한 네트워크. 가장 강력한 보안 대책 필수
실무적으로, 로봇 안전 네트워크가 인터넷이나 사내 IT망과 연결되어 있다면 범주 2~3에 해당하므로 데이터 위변조·지연·무단 접근 등에 대한 보안 대책을 반드시 검토해야 합니다.
복잡한 개정 표준 대응, 웹 기반 솔루션 SafetyDesigner로 한번에 해결하세요.
설문 기반 위험성 평가부터 PFL 충돌 안전 분석, 표준 기반의 위험성 평가 보고서 자동 생성까지.
본 자료는 KS B ISO 10218-2:2025 표준 및 관련 표준(ISO 10218-1:2025, ISO/TS 15066:2016, ISO 12100 등)을 바탕으로 작성한 참고용 가이드입니다.
실제 로봇 셀 구성 시 세부적인 안전 사양과 증빙 방식은 개정 표준 원문을 충분히 확인하시고, 관련 인증 및 검사 요구 사항은 해당 기관과 반드시 사전에 협의하시기 바랍니다.
또한 ISO 10218-2:2025 표준은 KS 표준 부합화 (harmonization) 과정에서 일부 내용이 변경될 수 있습니다.