PFL 분석을 통한 협동로봇 시스템의 안전거리 최적화
Safetics의 안전분석 소프트웨어 SafetyDesigner를 활용하여 안전성과 생산성을 동시에 확보하는 방법을 확인하세요.
참고 표준: ISO 10218-1/2, ISO 13855, ISO 13857, ISO/TS 15066, KOROS 1162-1
1. 일반적인 문제와 해결책
협동로봇은 '산업용 로봇'이므로, 표준에서 요구하는 방호조치가 동일하게 수립되어야 합니다. 일반적으로 작업자 접근 시 감속 및 정지하는 속도-이격감시 모드(SSM) 또는 펜스/센서 없이 충돌 힘/압력을 제한하는 동력 및 힘 제한 모드(PFL)를 사용합니다.
문제점
- 공간 비효율성: 로봇의 운전 속도 또는 정지 요구 시간에 따라 약 1.5m~3m의 넓은 안전거리가 필요하여 공간 효율성이 크게 저하됩니다.
- 생산성 저하: SSM 모드에서 감속 속도의 안전성을 입증할 수 없어 보수적으로 낮은 속도를 설정하거나, 최종 정지 영역만 사용하여 작업자 감지 시마다 시스템이 완전히 멈추게 됩니다.
- 설정 불확실성: 감속 구간의 속도와 거리를 경험적으로 설정하여 안전성과 효율성 모두 확보하기 어렵습니다.
해결책
- 안전분석 소프트웨어 SafetyDesigner를 활용하여 PFL 모드의 로봇 운전 속도가 ISO/TS 15066의 힘/압력 허용치 이내임을 객관적으로 입증합니다.
- 이를 통해 ISO 13855 표준에서 요구하는 안전거리를 획기적으로 단축하면서도 안전한 PFL 속도를 극대화하는 솔루션을 제공합니다.
※ (참고) 유럽 시장의 요구사항
유럽 시장에서는 정지 시간 실측(STM, Stop Time Measurement)이 최신 기술 수준(State of the Art)으로 간주됩니다. 제조사가 제공하는 정지/응답 시간은 실제 현장 조건과 차이가 있을 수 있어, 실측값 없이 제조사 데이터만으로 안전거리를 계산할 경우, 사고 발생 시 안전성을 충분히 증명하지 못할 수 있습니다.
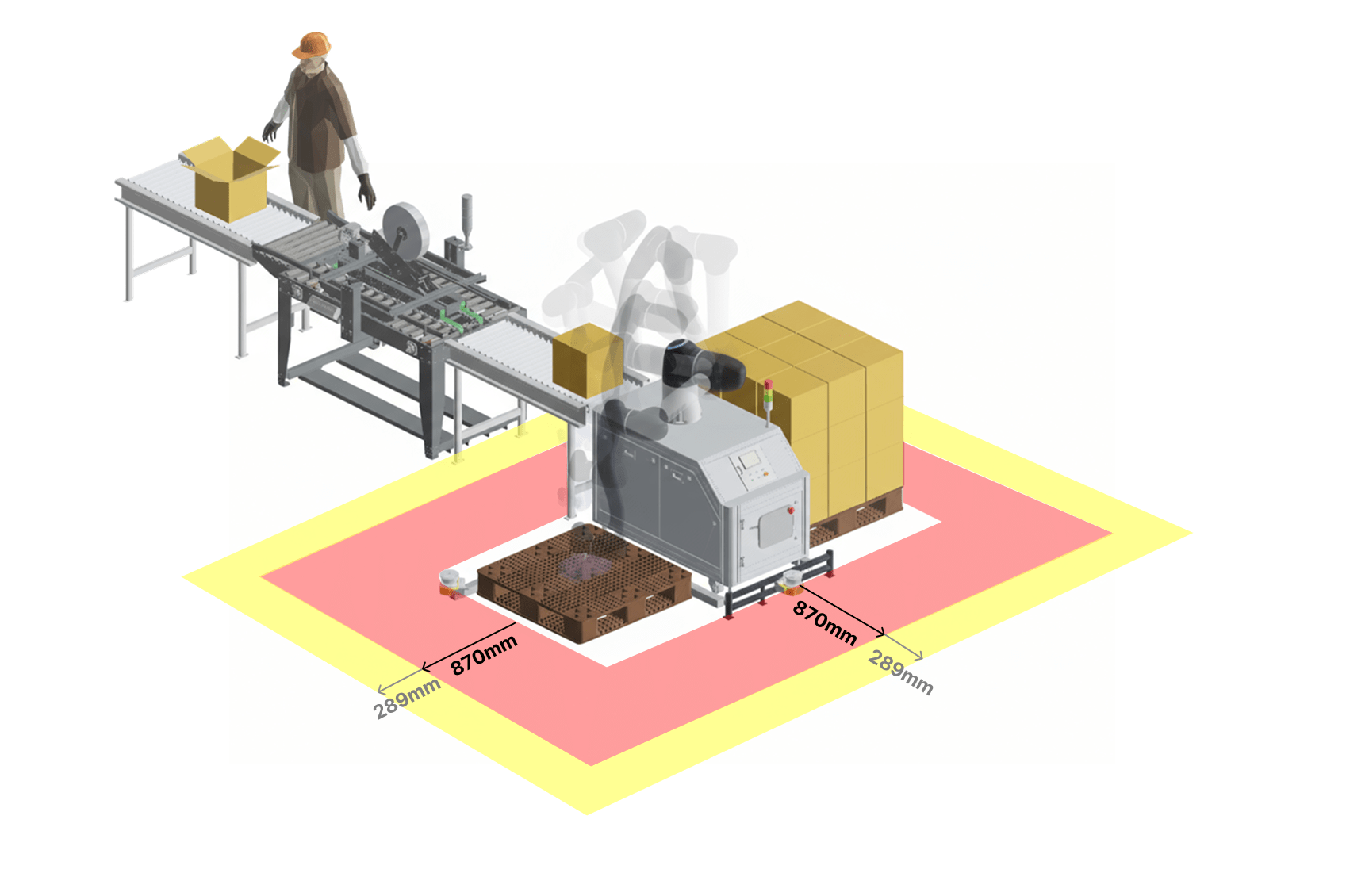
2. SafetyDesigner를 활용한 안전거리 최적화 프로세스 예시
충돌안전분석(PFL)과 안전 센서(SSM)를 조합하여, 다음과 같이 방호 대책의 안전성을 검증합니다.
| 영역 명칭 | 작업자 상태 | 로봇 동작 | 적용된 방호 조치 및 안전성 검증 방법 |
|---|---|---|---|
| 정상 운전 영역 | 감지되지 않음 | 최대 속도 | - |
| 감속 운전 영역 (Warning Zone) |
경고 영역 진입 | 감속 운전 | SafetyDesigner로 충돌 시 힘/압력을 분석하여 안전성과 생산성이 최적화된 로봇 속도를 도출하고, 해당 속도로 운전합니다. |
| 정지 영역 (Protective Zone) |
정지 영역 진입 | 보호 정지 | 동적 충돌을 허용하지 않는 신체 부위(머리, 목)가 충돌 가능한 영역에 작업자가 진입하면, 센서가 감지하여 로봇을 정지합니다. |
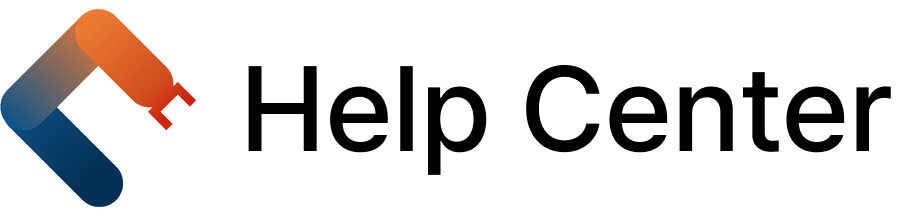
2.1. 1단계: PFL 분석 (SafetyDesigner)
- 목표: 감속 운전 영역에서 적용할 최대 PFL 운전 속도를 도출합니다.
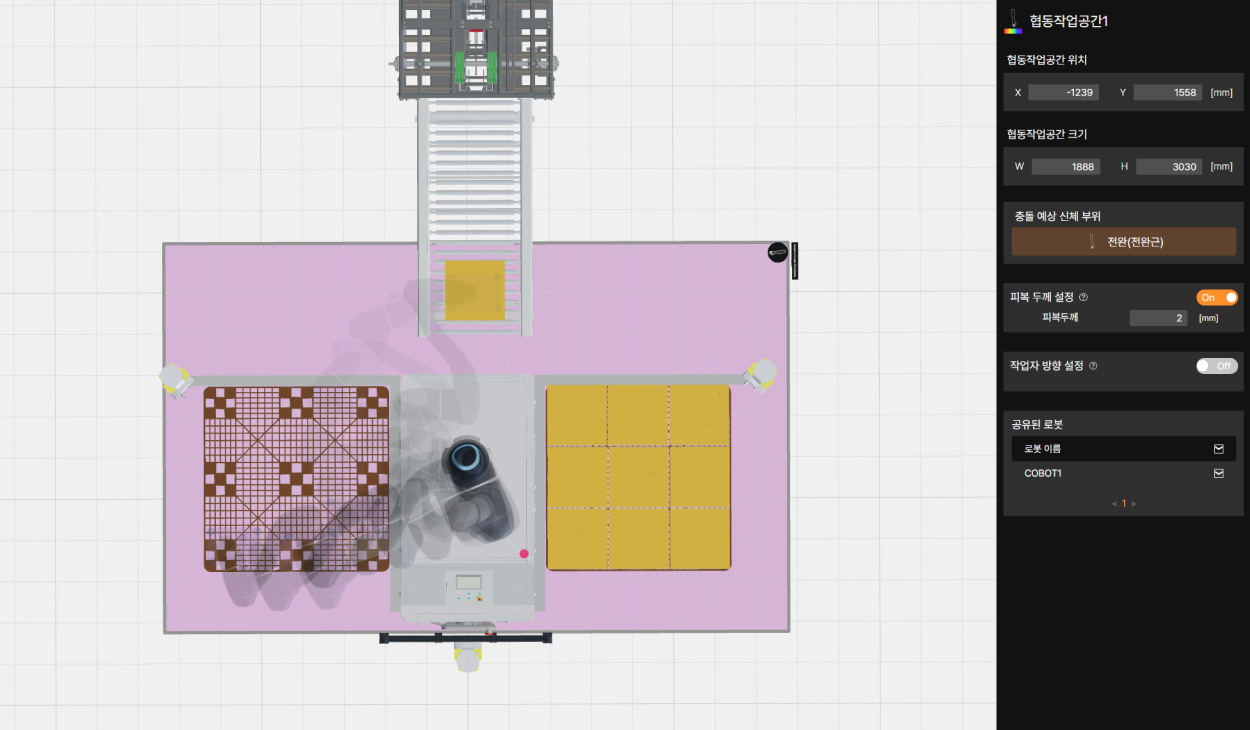
- 방법: 로봇 모션 데이터와 3D CAD(엔드이펙터, 작업대상물)를 SafetyDesigner에 입력하여 충돌 시뮬레이션을 수행합니다. 충돌 신체 부위는 작업자가 감속 영역에서 접촉 가능한 부위(팔, 손 등)로 설정합니다.
- 결과: ISO/TS 15066의 힘/압력 허용치를 준수하는 최적 속도를 산출하고, 안전성을 입증하는 분석 리포트를 발행합니다.
(본 예시: 정상 운전 2,000mm/s → 감속 운전 1,300mm/s)
2.2. 2단계: 감속 및 정지 거리 계산
ISO 13855 안전거리 공식 적용
1단계 PFL 분석 결과를 바탕으로, ISO 13855의 수평 감지 안전거리 공식을 2개 구역에 맞게 적용합니다.
기본 공식: S = (K × T) + C
K = 손 접근 속도 (1,600mm/s)
T = 총 정지 시간 (센서 응답 + 로봇 정지)
C = 침투 거리 = 1,200 - (0.4 × H)
H = 센서 설치 높이 (본 예시: 300mm)
시나리오 2-1: (권장) 정지 시간 실측 방식 (STM)
측정 장비를 통해 실제 정지 시간과 거리를 측정하여 적용하는, 법적으로 가장 확실한 안전성 확보 방식입니다.
A. 감속 운전 영역 거리 (Sw):
측정 장비를 통해 최대 속도(2,000mm/s)에서 PFL 운전 속도(1,300mm/s)로 감속하는 데 필요한 로봇의 실제 이동 거리를 측정합니다.
(예시 측정값: Sw = 289mm)
B. 정지 영역 거리 (Sp):
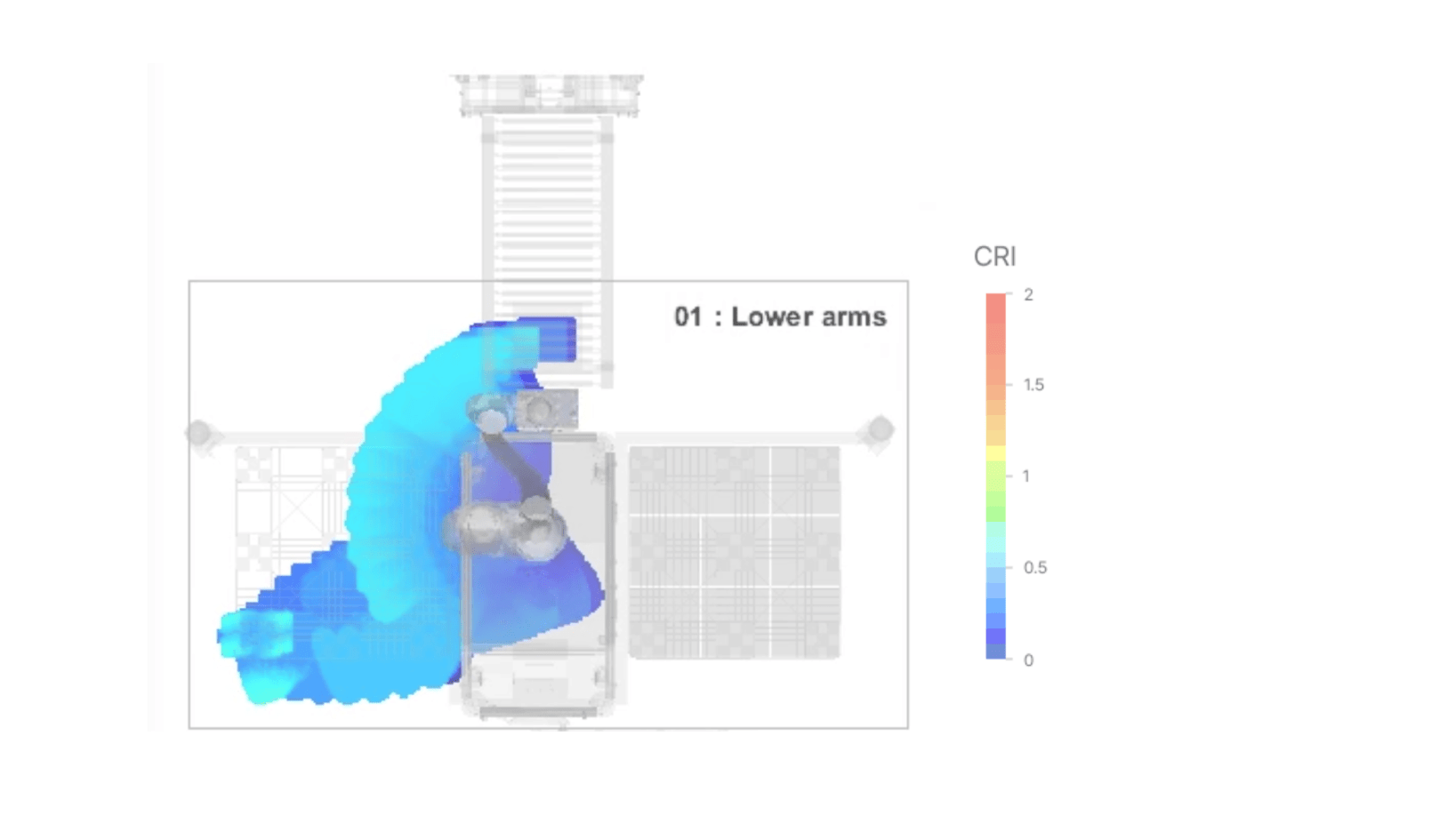
① 기본 안전거리 계산: 실측된 총 정지 시간(Tmeasured = 0.4s)을 ISO 13855 공식에 적용합니다.
S_p = (1,600 × 0.4) + (1,200 - (0.4 × 300))
= 640 + 1,080 = 1,720mm
② PFL 최적화 적용: 1단계에서 '팔(Arm)' 충돌의 안전성을 입증했으므로, ISO 13857 표준의 팔 도달 거리 850mm를 감산할 수 있습니다.
S_p = 1,720 - 850 = 870mm
시나리오 2-2: (대안) 제조사 제공 정지 시간 활용
측정 장비가 없을 경우 제조사 스펙을 활용하는 방식이나, 현장 변수(온도, 부하 등)로 인해 유럽 등 일부 시장에서는 법적 근거로 활용하기 어려울 수 있습니다.
A. 감속 운전 영역 거리 (Sw):
제조사 제공 정지 시간(예: 0.5s)으로부터 최대 감속도(amax = -4,000mm/s²)를 역산하여 감속 거리를 계산합니다.
S_w ≈ 289mm
B. 정지 영역 거리 (Sp):
① 기본 안전거리 계산: 로봇 감속 시간(0.325s) + 센서/PLC 응답 시간(0.075s)을 합산하여 총 정지 시간 Tspec = 0.4s로 가정합니다.
S_p = (1,600 × 0.4) + 1,080
= 1,720mm
② PFL 최적화 적용: 시나리오 2-1과 동일하게 팔 도달 거리 850mm를 감산합니다.
S_p = 1,720 - 850 = 870mm
※ 중요: 최소 보호 거리 권장사항
최종 계산된 Sp 값이 850mm 미만인 경우, 작업자의 예측 불가능한 행동(예: 감지 영역 너머로 올라서는 행위)을 고려하여 최소 보호 거리를 850mm 이상으로 설정하는 것이 좋습니다.
3. 최종 결과 및 기대 효과
3.1. 안전거리 비교 분석
| 구분 | 기존 방식 (단일 보호 구역) |
최적화 방식 (SSM + PFL) |
|---|---|---|
| 감속 운전 영역 | 알 수 없음 | 289mm |
| 정지 영역 | 1,720mm | 870mm |
효과 1. 안전거리 단축
약 33%의 안전거리 단축으로 작업 공간 효율성을 증대시키고, 설비 배치의 유연성을 확보합니다.
효과 2. 생산성 최대화
작업자 감지 시 즉시 정지하거나 안전성이 검증되지 않은 임의의 속도로 감속하는 대신, 충돌 안전성이 검증된 PFL 속도로 운영을 최대한 지속하여 가동 중지를 최소화합니다.
4. 핵심 기술 Q&A
Q1: 로봇이 '머리 높이'에서 작업해도 되나요?
A: 네, 가능합니다. 위 로봇 시스템 예시는 로봇이 정지하기 전에 레이저 스캐너로 작업자의 머리/목과 동적 충돌이 일어날 위험을 근본적으로 차단하는 것이 목적입니다. 마찬가지로, 작업자의 머리가 닿기 전에 로봇을 안전하게 정지시킬 수 있다면, 머리 높이 작업도 허용됩니다.
Q2: ISO/TS 15066의 '얼굴 65N'은 머리 충돌이 허용된다는 의미 아닌가요?
A: 아닙니다. '준정적 접촉(끼임)'과 '동적 충돌(자유 충돌)'을 명확히 구분해야 합니다. 표준에 명시된 65N은 신체가 끼였을 때(Quasi-static)의 허용 힘이며, 머리/목 부위의 동적 충돌 허용 한계치는 'N/A'(허용 안 됨)로 규정되어 있습니다.
Q3: '감속 운전'을 유발하는 센서 신호를 Fail-safe(OSSD)로 구성해야 하나요?
A: 아닙니다. 표준은 작업자 보호를 위한 '보호 정지(Protective Stop)' 기능에 Fail-safe 구현을 요구합니다. '감속' 기능은 안전성을 위한 부가 기능이므로 일반 제어 신호로 구성할 수 있습니다.
Q4: 안전거리 감산 시 왜 1,200mm(상체)가 아닌 850mm(팔)를 적용하나요?
A: PFL 분석으로 안전성을 입증한 신체 부위가 '팔(Arm)'이기 때문입니다. ISO 13857의 1,200mm는 상체를 숙였을 때의 최대 도달 거리로 머리/목을 포함할 수 있습니다. SafetyDesigner로 '팔' 충돌의 안전성을 입증했으므로 '팔 도달 거리 850mm'를 감산할 수 있습니다. 만약 1,200mm를 감산하려면 머리 충돌 안전성까지 입증해야 하나, Q2에서 설명한 바와 같이 표준상 불가능합니다.