로봇 설치 환경에 따라 네트워크 연결을 설정합니다.
팁
모션 추출에 사용할 PC의 인터넷 연결을 미리 해제한 상태에서 아래의 순서로 진행합니다.
1. 네트워크 연결하기 1/2
- Step 1. 로봇에 PLC, PC 등 외부 제어기기가 기존에 연결되어 있었다면, 연결되어 있다를 선택합니다. 아무 기기도 연결되어 있지 않다면 연결되어 있지 않다를 선택합니다.
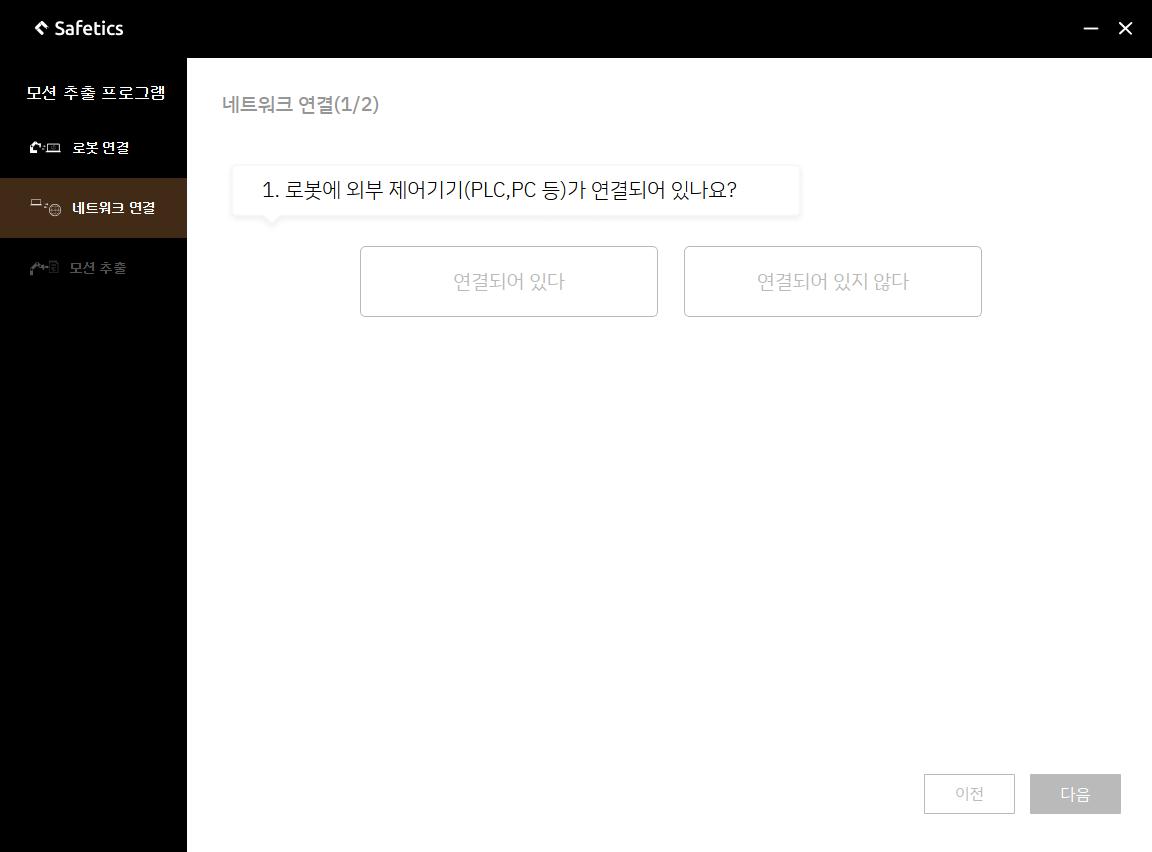
네트워크 연결 1/2 – 제어기기 유무 선택
- Step 2. 로봇에 랜선을 연결할 수 있는 포트가 남아 있다면 있다를 선택합니다. 여유 포트가 없다면 없다를 선택합니다.
주의
로봇의 단자가 이더넷 포트가 맞는지 반드시 확인합니다. 일반적인 PC의 유선 통신 방식과 다른 규격의 단자(예: EtherCAT 포트)에 연결 시 통신이 불가능합니다.
- Step 3. Step 1 과 Step 2 의 선택을 완료하여 모션 추출 프로그램의 하단 영역에 나타나는 안내 문구에 따라 추출 환경을 구성합니다.
- Step 4. 환경 구성을 완료하였다면 다음을 클릭하여 네트워크 연결의 다음 설정 화면으로 이동합니다.
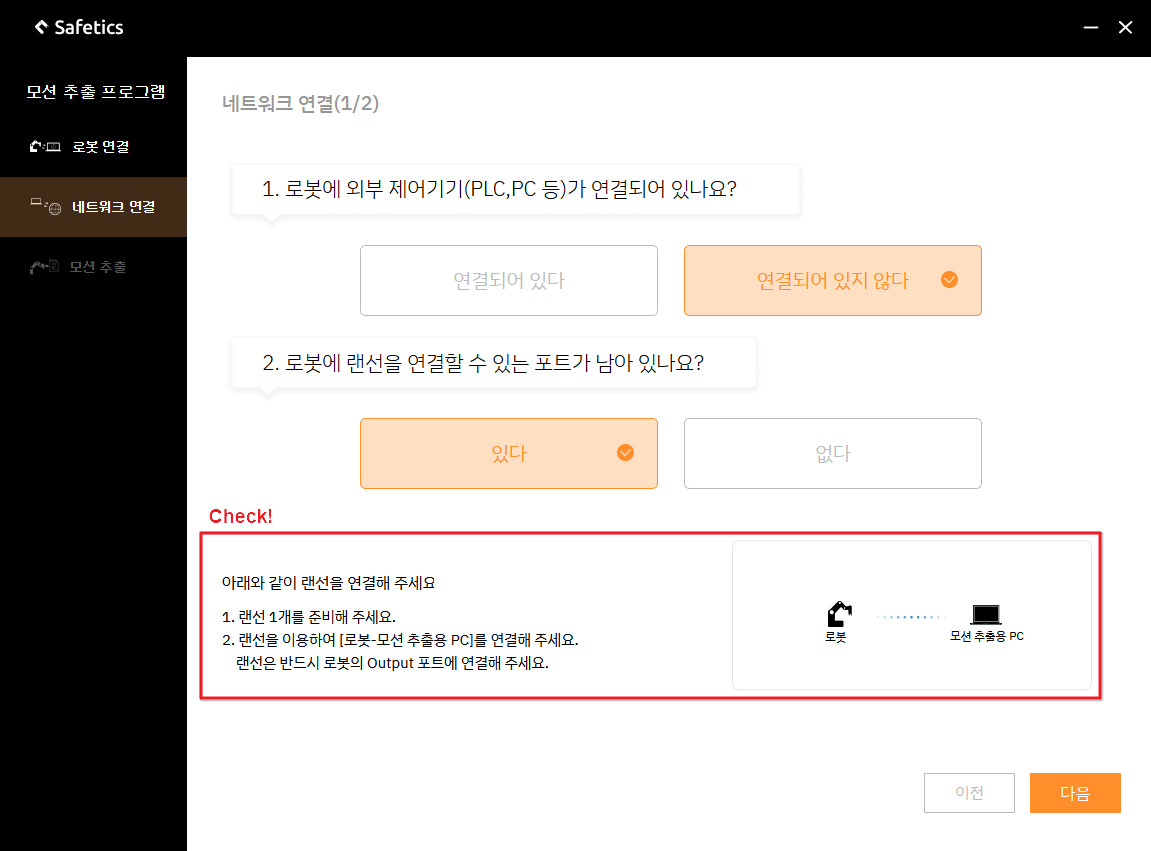
네트워크 연결 1/2 – 여유 포트 선택
2. 네트워크 연결하기 2/2
로봇과 PC를 연결하기 위해 IP 설정을 합니다.
- Step 1. 추출에 사용할 PC의 네트워크 어댑터 설정 변경을 위해 제어판 – 네트워크 및 인터넷 – 네트워크 연결로 진입합니다.
주의
아래 단계를 진행하기 전, 연결 상태를 우선 점검합니다. 1. ‘식별되지 않은 네트워크’ 표시 시: 케이블 연결이 정상이며, 네트워크 속성 변경 진행 가능 2. ‘네트워크 케이블 언플러그됨’ 표시 시: 케이블 연결 자체(물리적 연결)에 문제가 있을 수 있으며, 네트워크 속성 변경 진행 불가능
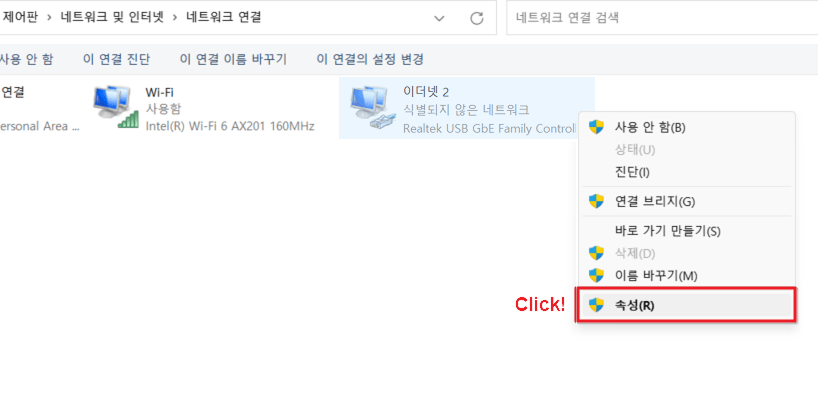
제어판 설정 – 네트워크 어댑터 마우스 우클릭 화면
- Step 2. 로봇과 유선으로 연결할 이더넷 어댑터에 마우스 오른쪽 버튼을 클릭을 하여 속성으로 진입합니다.
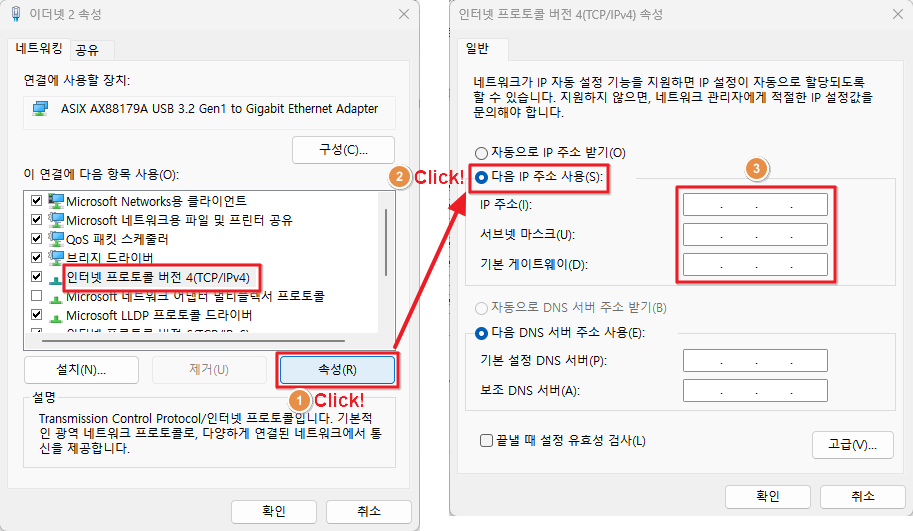
이더넷 속성과 IPv4 속성 화면
- Step 3. 어댑터 속성 화면에서 인터넷 프로토콜 버전 4(TCP/IPv4) 를 선택하고 속성을 클릭하여 IP 주소 설정 화면을 엽니다.
- Step 4. 다음 IP 주소 사용을 선택하고 서브넷 마스크, 기본 게이트웨이를 모션 추출할 로봇과 동일하게 입력합니다.
IP 주소는 로봇과 동일하게 입력하되, 네 자리중 가장 끝의 호스트 숫자만 255 미만의 임의의 수로 변경하여 입력합니다.
주의
IP 주소의 호스트 숫자는 로봇, 공유기(PC 와 로봇을 공유기를 통해 연결한 경우)와 반드시 다르게 입력해야 합니다.ex) 로봇의 IP 가 192.168.10.2, 서브넷 마스크가 255.255.255.0, 기본 게이트웨이가 192.168.10.1인 경우, 위 화면에서 각각 192.168.10.XXX, 255.255.255.0, 192.168.10.1 을 입력합니다. – Step 5. 입력을 완료하였다면 확인을 눌러 설정을 저장합니다.
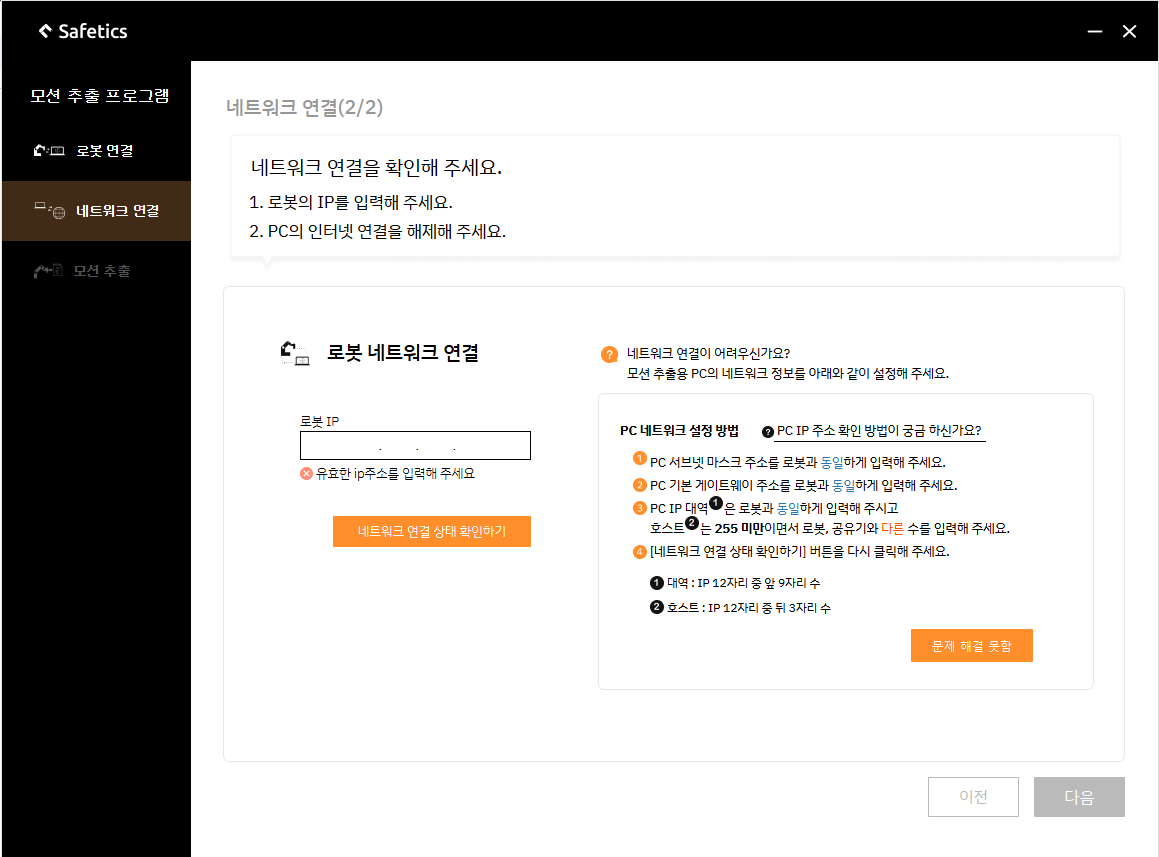
네트워크 연결 2/2 – 연결 실패
- Step 6. 모션 추출 프로그램의 로봇 IP 에 로봇의 IP 를 입력하고, 네트워크 연결 상태 확인하기를 클릭하여 로봇 연결을 확인합니다.
위와 같이 로봇과 연결이 되지 않는 경우, 프로그램 화면 오른쪽의 조치 가이드(PC 네트워크 설정 방법)를 따라 문제 해결을 진행합니다.
팁
가이드를 따라 설정을 완료하였지만 연결이 정상적으로 진행되지 않는 경우, Step 5. 제어판 설정 저장 이후 PC를 재부팅하고 로봇 연결을 다시 시도합니다.