Safetics는 협동로봇 사용 현장에서 충돌 위험도를 감소하기 위한 방법 중 하나로 격자 형태의 충격 감소재인 소프트커버를 위험 부위에 접착하는 것을 제안하고 있습니다. 또한, SafetyDesigner에서 로봇의 관절 또는 충돌예상부위에 가상의 소프트커버를 설정하여 충돌 안전 분석에 이용할 수도 있습니다.
팁
소프트커버는 위험 부위에 맞는 설계가 필요하며 일정 비용이 발생합니다. 제작은 Safetics에 문의해주세요.
소프트커버를 설정하면 분석 결과에서 해당 부위의 충돌 위험 지수(CRI, Collision Risk Index) 값이 유의미하게 낮아지므로 시뮬레이션 결과의 Pass / Fail 여부를 결정하는데 큰 영향을 끼칠 수 있습니다.
소프트커버 설정 방법과 설정 전 / 후의 분석 결과 차이를 H2017 로봇을 이용한 예시를 통해 알아보겠습니다.
1. 소프트커버의 설정
소프트커버를 설정할 수 있는 방법에는 두 가지가 있습니다.
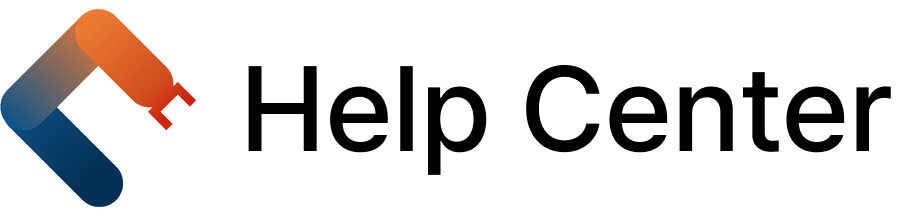
① 로봇 관절에 소프트커버 설정하기
카테고리 메뉴의 로봇 정보에서 로봇 관절 부위에 소프트커버를 적용하여 분석을 할 수 있습니다.
로봇 관절에 소프트커버를 적용한 경우
체크 박스를 클릭하면 해당 Point에 소프트커버가 적용된 상태로 충돌 분석이 가능합니다.
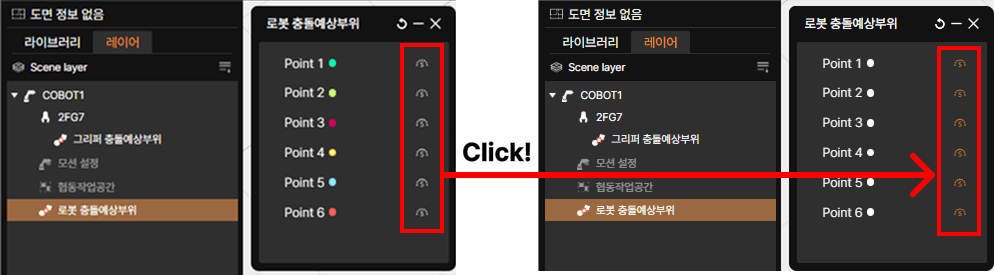
② 충돌예상부위에 소프트커버 설정하기
충돌예상부위에 소프트커버를 설정한 경우
3D 화면 왼쪽의 분석 정보 목록에서 소프트커버를 적용할 충돌예상부위의 아이콘에 마우스 클릭을 하여 설정을 완료합니다.
팁
충돌예상부위의 설정은 충돌예상부위 생성를 참고하세요.
2. 분석 결과 확인
소프트커버 적용이 CRI 값에 어떤 영향이 있는지 확인하기 위해 H2017 로봇을 이용한 분석 결과 화면 예시를 통해 알아보겠습니다.
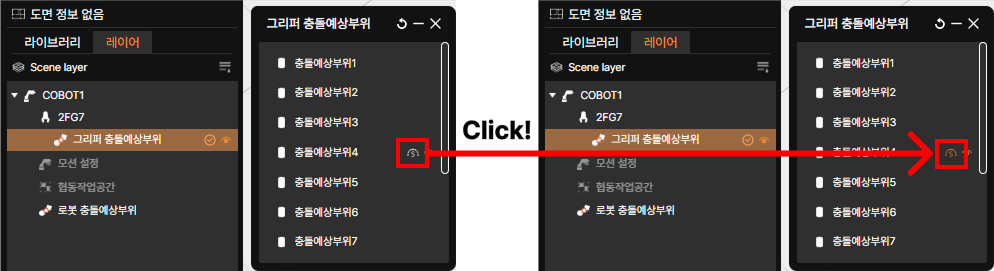
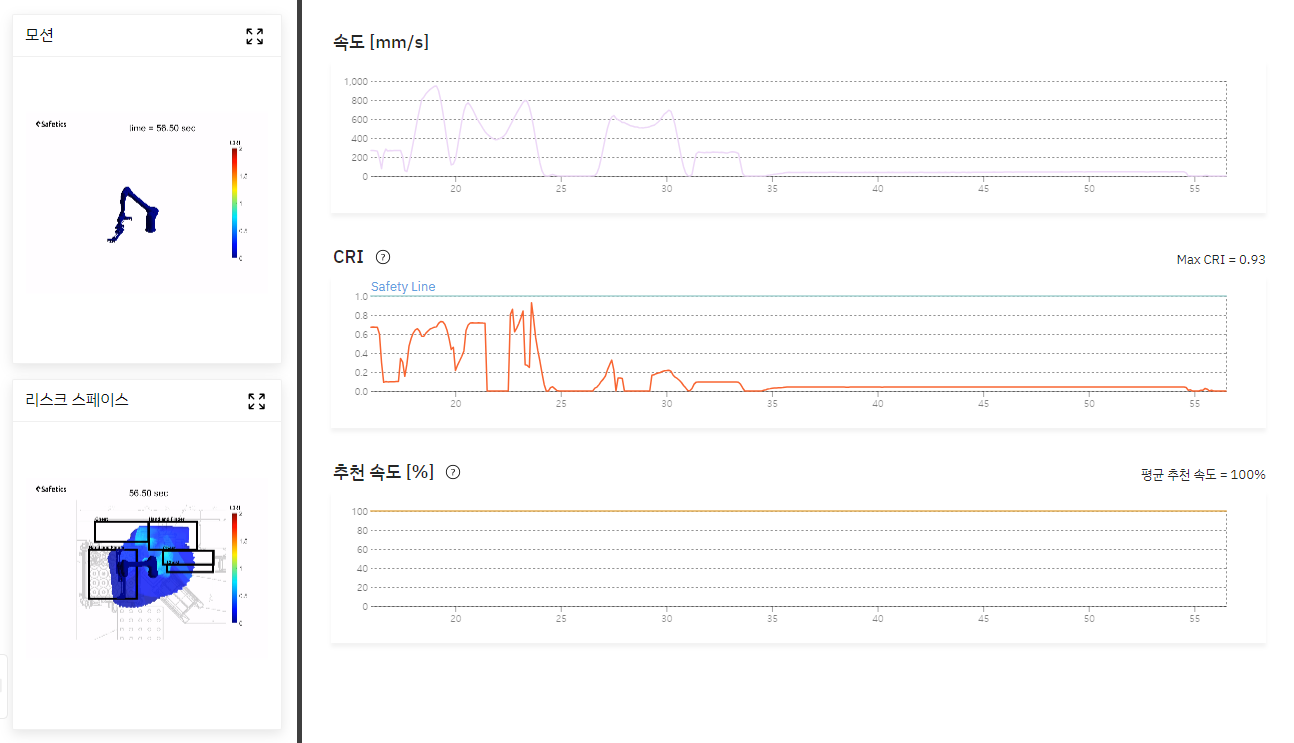
① 로봇 관절에 소프트커버를 적용한 경우
로봇의 관절 부위 중 Point 5 에 소프트커버를 적용하기 전 Max CRI 값은 0.93 이었으나, 소프트커버 적용 후 0.875 로 수치가 낮아졌음을 알 수 있습니다.
충돌 분석 결과 – 로봇 관절에 소프트커버 적용 전
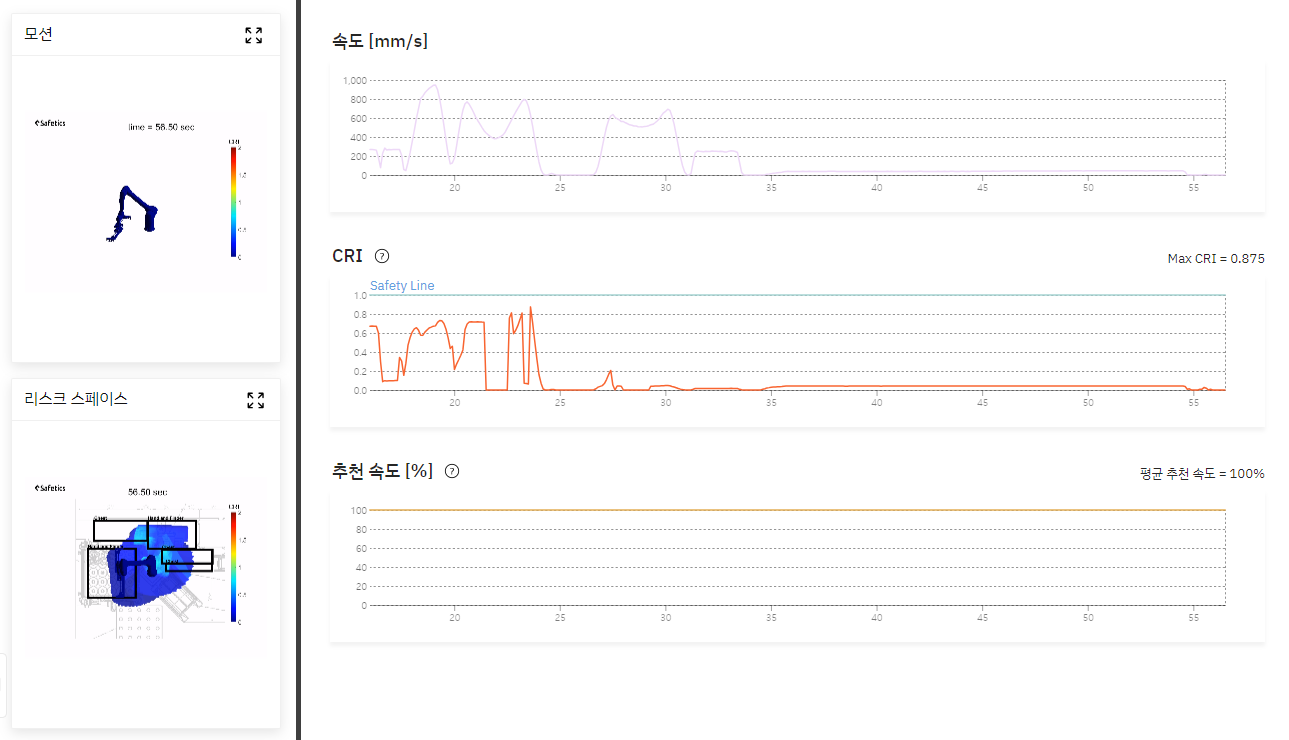
충돌 분석 결과 – 로봇 관절에 소프트커버 적용 후
② 충돌예상부위에 소프트커버를 적용한 경우
소프트커버를 적용하기 전 두 충돌예상부위의 CRI 값은 각각 0.714, 0.73 이었으나, 적용 후 0.354, 0.391 로 현저히 낮아졌음을 알 수 있습니다.
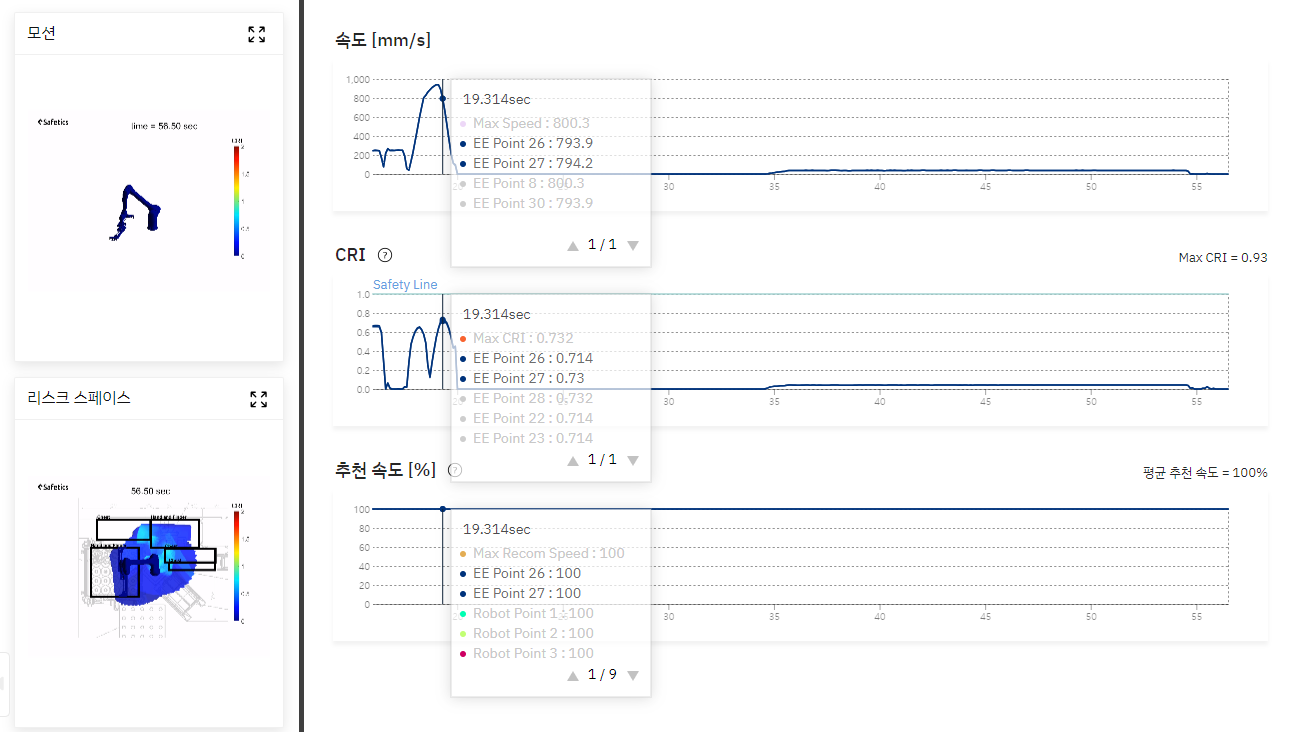
충돌 분석 결과 – 충돌예상부위에 소프트커버 적용 전
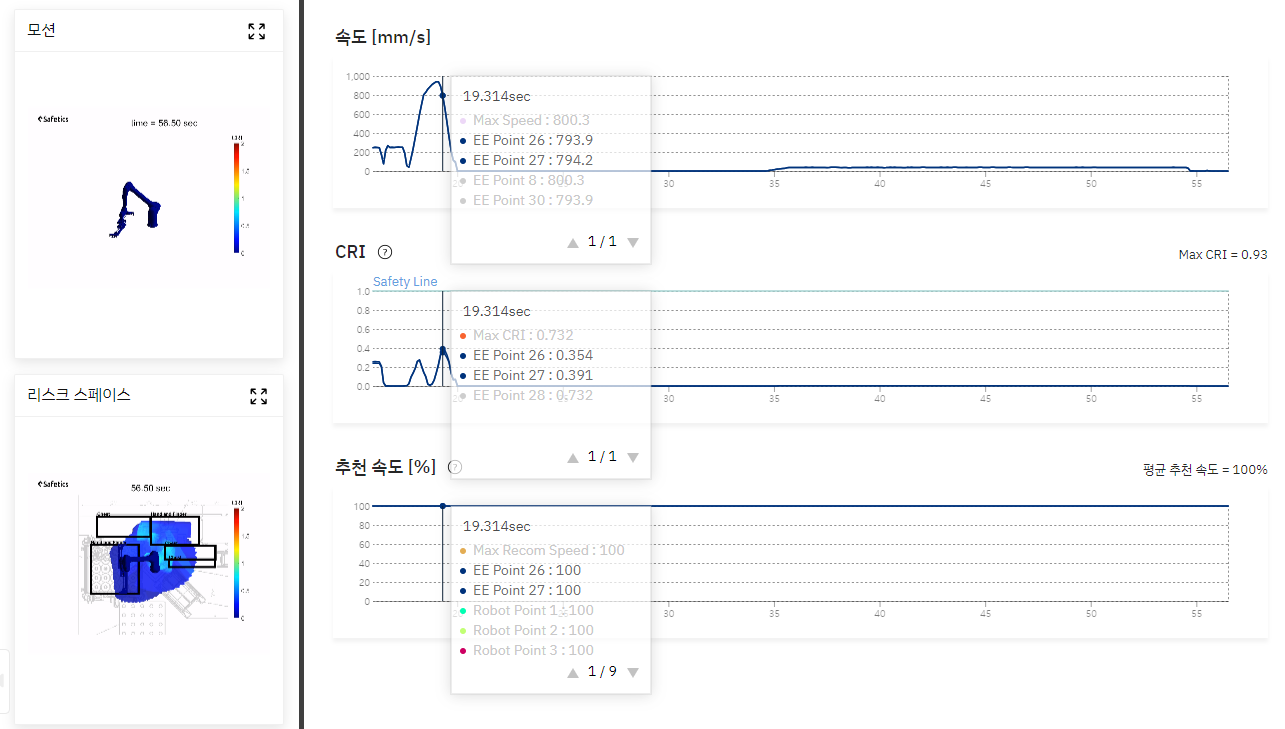
충돌 분석 결과 – 충돌예상부위에 소프트커버 적용 후