협동로봇을 포함한 산업용 로봇 시스템을 안전하게 사용하기 위해서는 로봇 시스템 설정 시 명확한 영역(Space)에 대한 정의가 필요하며, 이를 기반으로 위험성 평가가 이루어져야 합니다. 또한, 로봇 시스템 내에 감응형 방호장치(예: 라이트커튼, 레이저 스캐너 등) 또는 펜스를 설치하는 경우, 안전 거리를 계산하는 명확한 기준을 따라야 합니다.
안전영역의 명칭과 표준에 근거한 안전 거리 계산 방법에 대해 알아봅니다.
1. 로봇의 안전영역

ISO TS 15066 – 운전영역의 구분
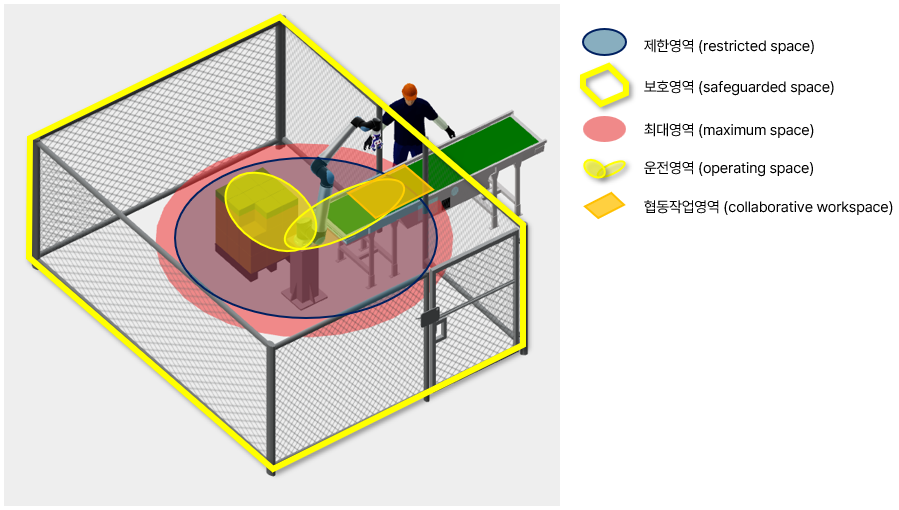
협동로봇 시스템 안전영역 표시 예시
① 제한영역 (restricted space)
로봇과 사람이 안전하게 협력할 수 있도록 설정한 공간을 의미합니다. 협동로봇은 기본적으로 사람과 동일한 작업 공간을 공유하며 안전하게 상호작용 할 수 있도록 설계되어 있지만, 운전영역을 벗어나 작업자와 충돌하는 등의 위험한 상황을 배제하기 위해 안전을 보장할 수 있는 영역을 지정해야 합니다.

두산 로봇의 제한영역 설정 예시
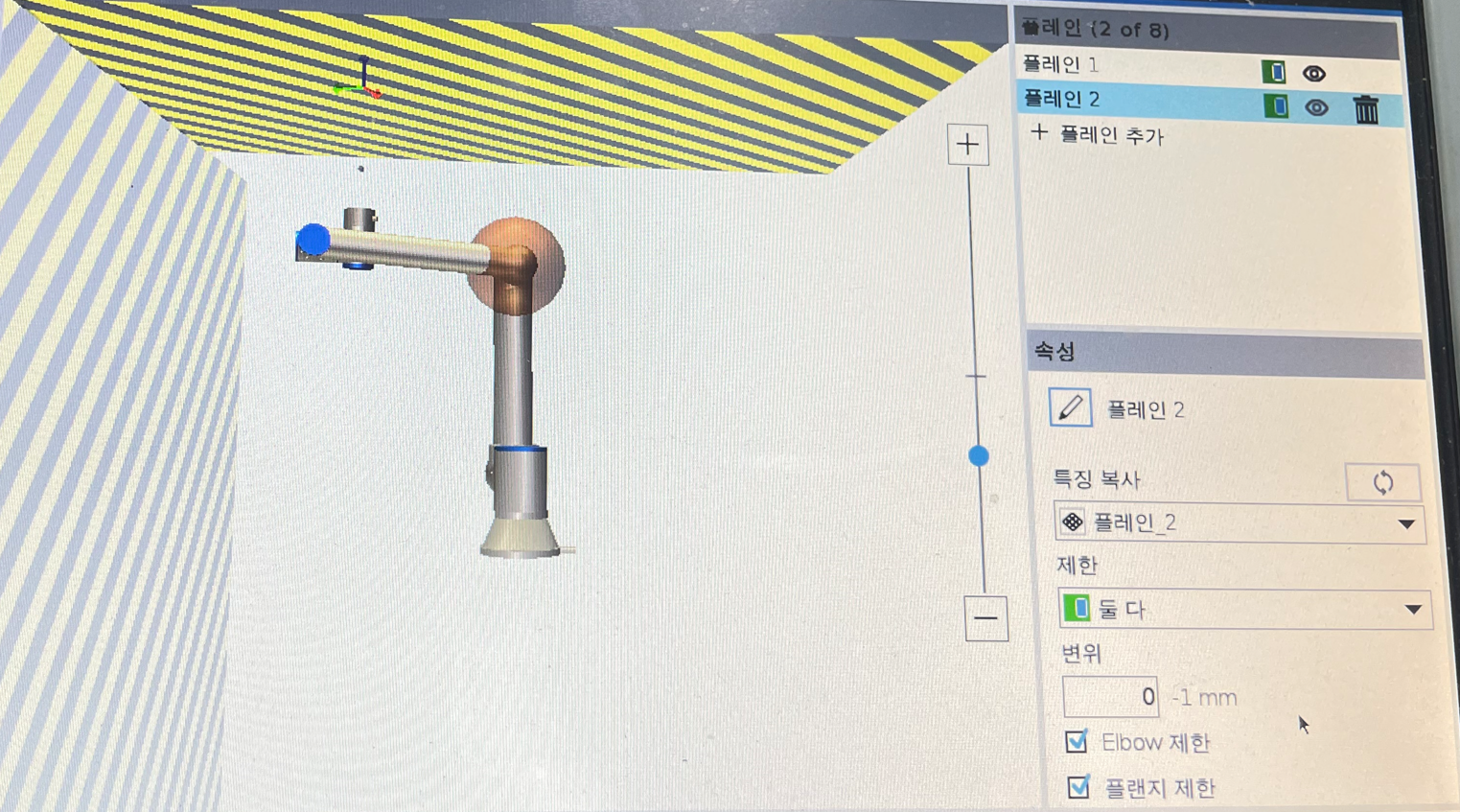
유니버셜 로봇의 제한영역 설정 예시
협동로봇은 일반적으로 PL d, Cat 3 안전 등급을 지니므로, 제조사에서 제공하는 안전 기능을 활용해 티칭팬던트에서 소프트웨어적으로 제한영역을 설정하며, 이 경우 로봇이 제한영역을 벗어나면 보호정지 합니다. 소프트웨어로 제한영역을 설정할 수 없는 로봇은 스토퍼와 같은 물리적 수단을 사용해 설정하기도 합니다.
② 보호영역 (safeguarded space)
안전펜스에 의해 물리적으로 사람의 접근이 제한되거나, 안전 관련 센서(레이저 스캐너, 라이트 커튼, 안전매트 등의 감응형 방호장치)에 의해 사람의 접근이 감지되는 영역을 뜻합니다.
보호영역은 일반적으로 제한영역과 운전영역을 포함합니다.
③ 최대영역 (maximum space)
로봇과 말단장치(end effector), 로봇에 의해 이동되는 작업대상물을 포함하여 로봇이 도달할 수 있는 가장 넓은 영역을 의미합니다.
④ 운전영역 (operating space)
로봇과 말단장치, 로봇에 의해 이동되는 작업대상물을 포함하여 사용자가 지정한 작업프로그램에 의해 로봇이 동작을 수행하는 동안 사용되는 영역을 의미합니다.
⑤ 협동작업영역 (collaborative workspace)
로봇의 운전영역 중 작업자와 동시 및 순차적으로 존재할 수 있는 영역, 또는 로봇과 사람의 협업이 이루어지는 공간을 의미합니다.
⑥ 감속 및 정지영역 (deceleration & stopping space)
안전 관련 센서의 감지에 의해 로봇이 감속 또는 정지하는 영역을 의미합니다.
2. 로봇 시스템 안전영역 정보 기록하기
산업용 로봇 시스템의 위험성 평가 과정에서 위와 같이 설정된 로봇의 안전영역 정보를 반드시 기록합니다.
위험성 평가 보고서는 지정된 양식이 존재하지는 않으나, 본 사용팁 페이지에서는 SafetyDesigner의 위험성 평가 보고서 출력 기능을 활용하는 방법을 설명합니다.
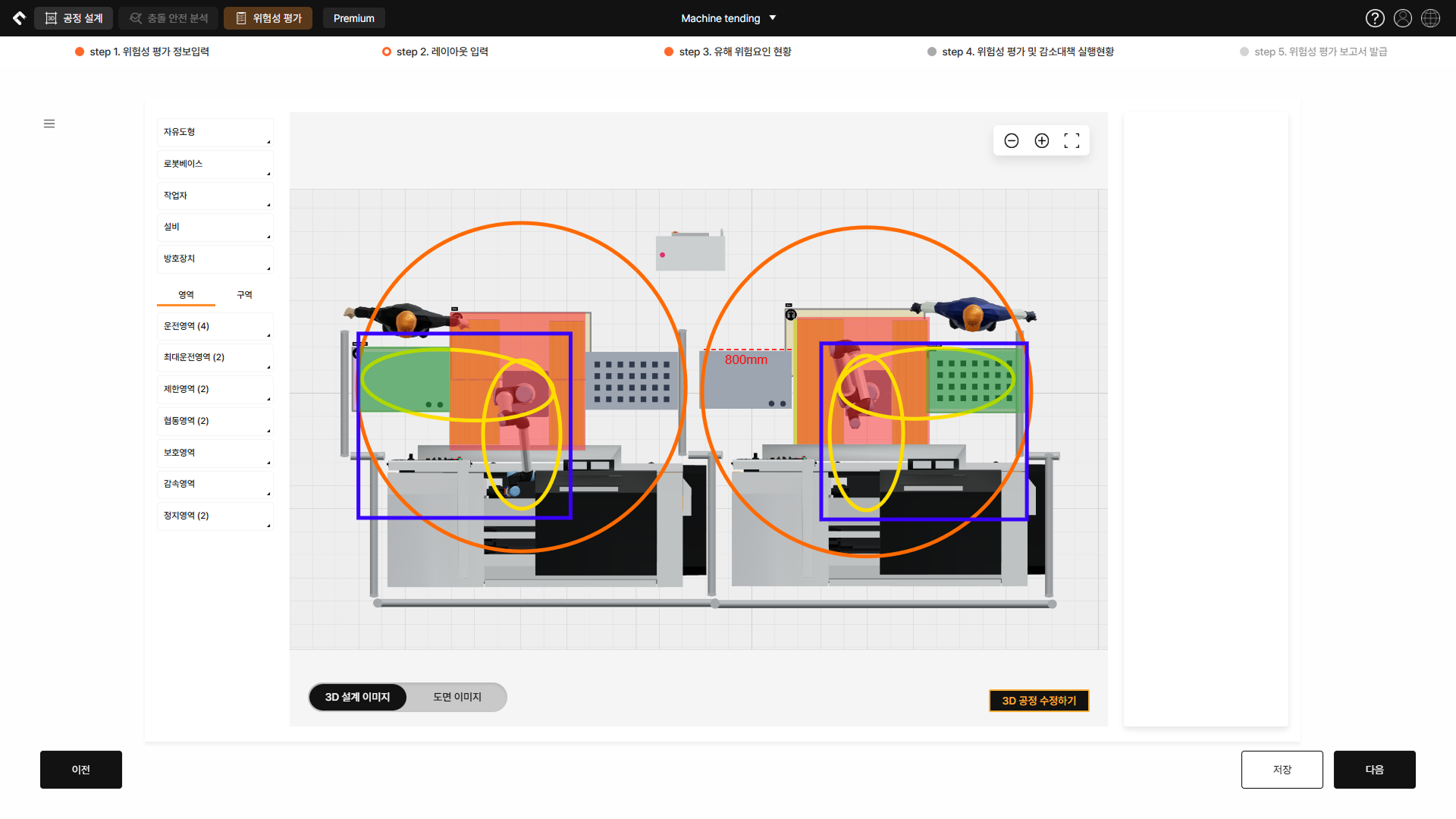
SafetyDesigner 위험성 평가 하기 – 안전영역 정보 입력
로봇 시스템에 설정한 안전영역의 정보를 위험성 평가 보고서에 입력합니다. 정보 입력 시에는 도면의 축척 또는 각 설비간의 거리를 알 수 있는 대략적인 정보가 필요하므로, 거리를 반드시 입력합니다.
안전영역 정보와 거리 정보를 입력했다면, 작업자의 위치와 공정 내의 방호장치와 안전설비(예: 비상정지 버튼, 감응형 방호장치, 타워램프) 위치를 표시합니다. SafetyDesigner 위험성 평가 기능의 레이아웃 입력 항목에서는 안전영역 정보를 Drag & Drop 형태로 쉽고 빠르게 입력할 수 있습니다.

SafetyDesigner 위험성 평가 하기 – 보고서 출력 예시
위험성 평가 보고서 출력 시, SafetyDesigner의 레이아웃 입력 항목에서 지정한 안전영역 정보가 표시되는 것을 확인할 수 있습니다.
3. 로봇 시스템 안전 거리 계산하기
산업용 로봇 시스템에 설치되는 감응형 방호장치(라이트커튼, 레이저 스캐너, 안전매트 등)는 로봇의 운전영역으로부터 계산된 안전 거리 만큼 감지하거나, 로봇의 운전영역으로부터 안전 거리를 두고 설치해야 합니다.
감응형 방호장치의 안전 거리는 KS B ISO 13855 표준의 계산 식에 근거하여 이루어지며, 계산 식은 다음의 세가지 사항을 고려합니다.
주의
본 페이지에서는 KS B ISO 표준에 명시한 안전거리 계산식 중 대표적인 형태에 대한 안내만 제공합니다. 자세한 사항은 반드시 표준 본문을 참고하세요.
① 작업자의 접근 속도 (K, mm/s)
일반적으로 작업자 접근 속도 K는 1600mm/s로 간주합니다.
② 로봇 시스템의 정지 소요 시간 (T, sec)
로봇 시스템의 정지 소요 시간은 방호 설비의 신호 출력 시간(t1)과 로봇의 최대 정지 소요 시간(t2)을 합한 값(t1 + t2)을 이용합니다. 정지 소요 시간은 방호 설비 및 로봇 제조사의 데이터 시트를 참조하면 확인할 수 있습니다.
로봇의 최대 정지 소요 시간은 가반 하중이 최대인 상태 및 가장 빨리 이동하는 상태에서 감속정지(1정지방식, Stop Category 1 또는 SS1) 시 요구되는 필요 시간을 이용합니다.
③ 최소 침범거리 (C, mm)
일반적으로 최소 침범거리는 팔 투입 거리인 850mm로 간주합니다.
아래에서는 방호 장치의 종류에 따른 안전 거리 계산 예시를 알아봅니다.
3-1. 위험점과 방호 장치의 방향에 따른 안전 거리 계산
① 방호 장치의 감지 영역이 위험 점과 수직인 로봇 시스템

위험점과 수직인 상태에서 감지하는 경우
라이트커튼을 설치하거나 레이저 스캐너를 천장에 설치하여 바닥 방향으로 감지하도록 설정하는 등, 방호 장치의 감지 영역이 위험 점과 수직인 경우 다음의 계산 식을 이용합니다.
K× T + (8 × (d – 14)) (d = 센서의 감지 능력)
단, 위 계산 식은 센서의 감지 능력이 40mm 이하인 경우에만 유효하며, 40mm 초과 70mm 이하의 감지 능력을 갖는 감응형 방호 장치는 C를 850으로 간주합니다.
팁
예 : 라이트커튼의 광축 피치가 20mm, 라이트커튼의 응답 속도가 0.1s, 로봇의 최대 정지 요구 시간이 0.4s 인 경우 → 안전 거리(S) = 1600 (0.1 + 0.4) + 8 (20 – 14) = 848(mm)
② 방호 장치의 감지 영역이 위험 점과 수평인 로봇 시스템

위험점과 수평한 영역을 감지하는 경우
레이저 스캐너로 바닥 면으로부터 일정 높이에서 사람의 접근을 감지하거나 안전매트를 설치하는 등, 방호 장치의 감지 영역이 위험 점과 수평인 경우 다음의 계산 식을 이용합니다.
K× T + (1200 – 0.4 × h) (h = 센서 감지면의 높이)
팁
예 : 레이저 스캐너의 응답 속도가 0.1s, 로봇의 최대 정지 요구 시간이 0.4s, 감지 기준 면으로부터 높이가 300mm인 경우 → 안전 거리(S) = 1600 (0.1 + 0.4) + 1200 – (0.4 300) = 1880(mm)
주의
본 페이지에서는 일반적인 감응형 방호 장치의 안전 거리 계산에 대한 내용을 설명하고 있습니다. 경사진 영역을 감지하는 방호 장치의 안전 거리 계산 방법과 방호 장치 설치 기준에 관련된 자세한 내용은 KS B ISO 13854, 13855, 13857 표준을 참조하세요.
주의
안전매트는 KS B ISO 13855 표준의 7.1절에 근거, 인간의 보폭을 고려하여 최소 750mm 이상의 제품을 사용하여야 합니다.