1. 도면 및 설비
좌측 레이어 – 도면 이미지 및 설비 배치
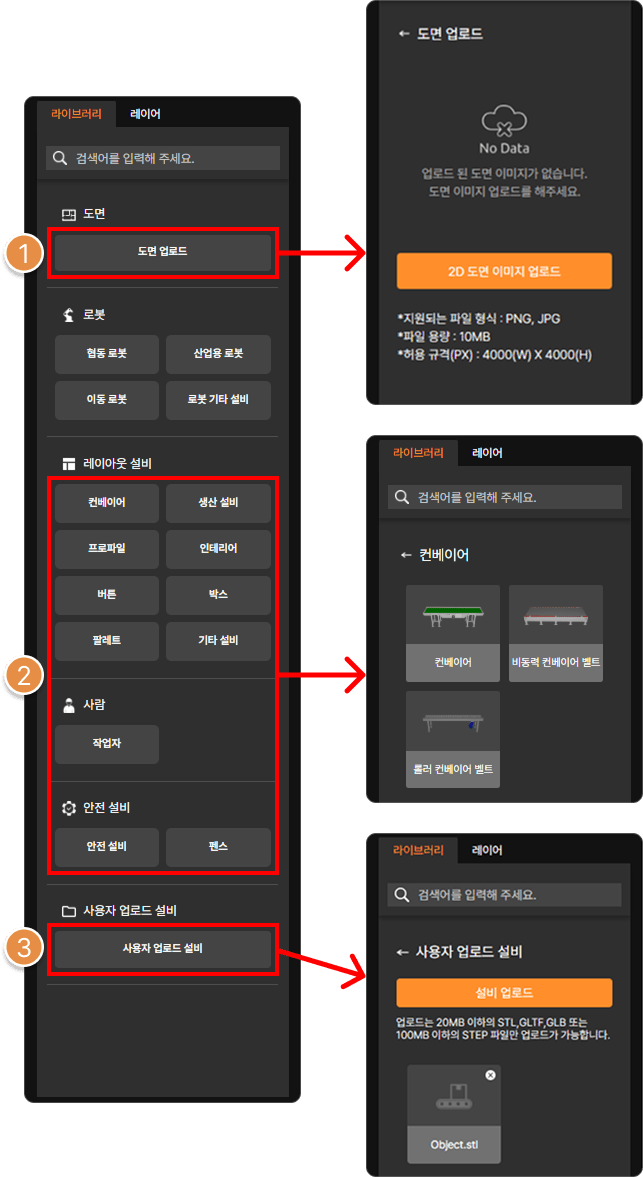
① 도면 업로드
2D 도면 이미지를 업로드하여 사용할 수 있습니다. 도면 이미지를 이용하면 3D 설비를 편리하게 배치할 수 있습니다.
② 레이아웃 설비
SafetyDesigner에 내장된 3D 설비 라이브러리를 이용할 수 있습니다.
③ 사용자 업로드 설비
3D CAD 설비 파일을 업로드 합니다. 20 MB 이하의 STL, GLTF, GLB 파일 또는 100 MB 이하의 STEP 파일을 업로드할 수 있습니다.
팁
SafetyDesigner에 업로드한 설비는 회전과 이동을 편리하게 하기위해 3D 원점을 수정하는 기능을 제공합니다. 자세한 내용은 편리한 사용팁 페이지의 3D Mesher란?을 참고하세요.
2. 분석 정보 입력 (협동 로봇)
2-1. 그리퍼 설정
카테고리 메뉴 – 그리퍼 설정
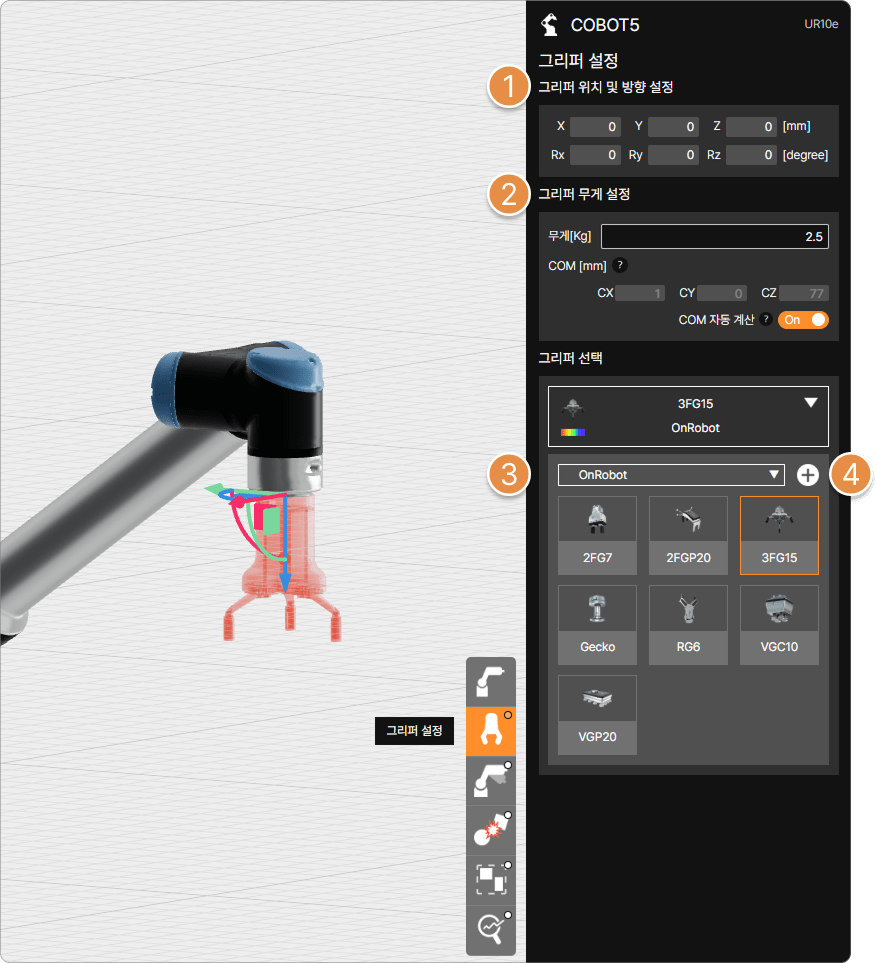
① 그리퍼 위치 및 방향 설정
로봇의 마지막 조인트 좌표계 위치(6축) 기준으로 그리퍼의 위치와 방향을 설정합니다.
② 그리퍼 무게 설정
그리퍼 또는 그리퍼와 작업 대상물의 무게 (Kg)를 설정하고, 무게 중심 (COM)을 설정합니다.
주의
그리퍼와 작업 대상물 무게의 합은 로봇의 최대 가반 하중을 초과할 수 없습니다.
③ 그리퍼 선택
라이브러리에 내장된 그리퍼 또는 그리퍼 파일을 업로드하여 충돌안전분석에 사용할 수 있습니다.
④ 사용자 그리퍼 업로드
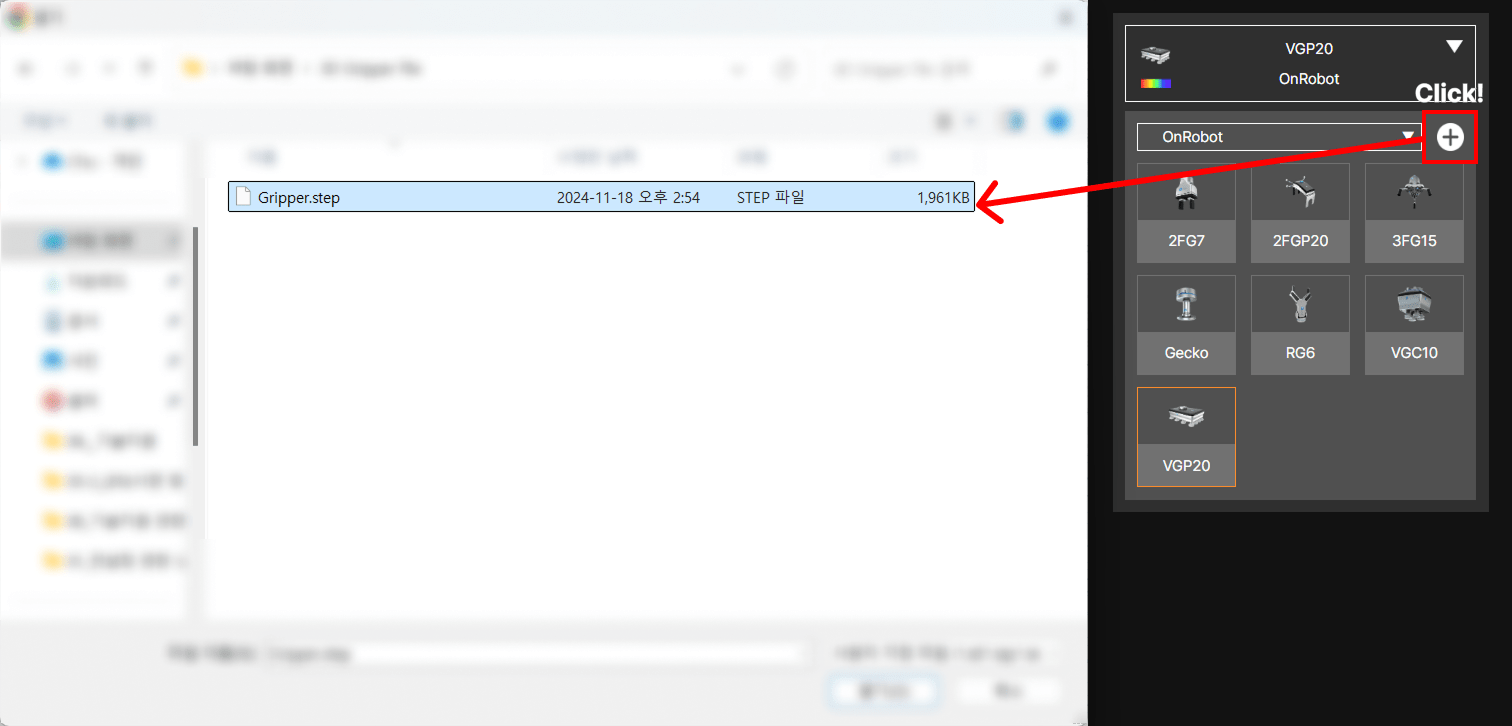
기본으로 제공되는 그리퍼 외에 공정에서 사용할 그리퍼를 업로드 할 수 있습니다. 그리퍼 파일은 20 MB 이하의 STL, GLTF, GLB 파일 또는 100 MB 이하의 STEP 파일을 업로드할 수 있습니다.
팁
SafetyDesigner에 업로드한 그리퍼는 회전과 이동을 편리하게 하기위해 3D 원점을 수정하는 기능을 제공합니다. 자세한 내용은 편리한 사용팁 페이지의 3D Mesher란?을 참고하세요
2-2. 충돌예상부위 생성
카테고리 메뉴 – 충돌예상부위 설정
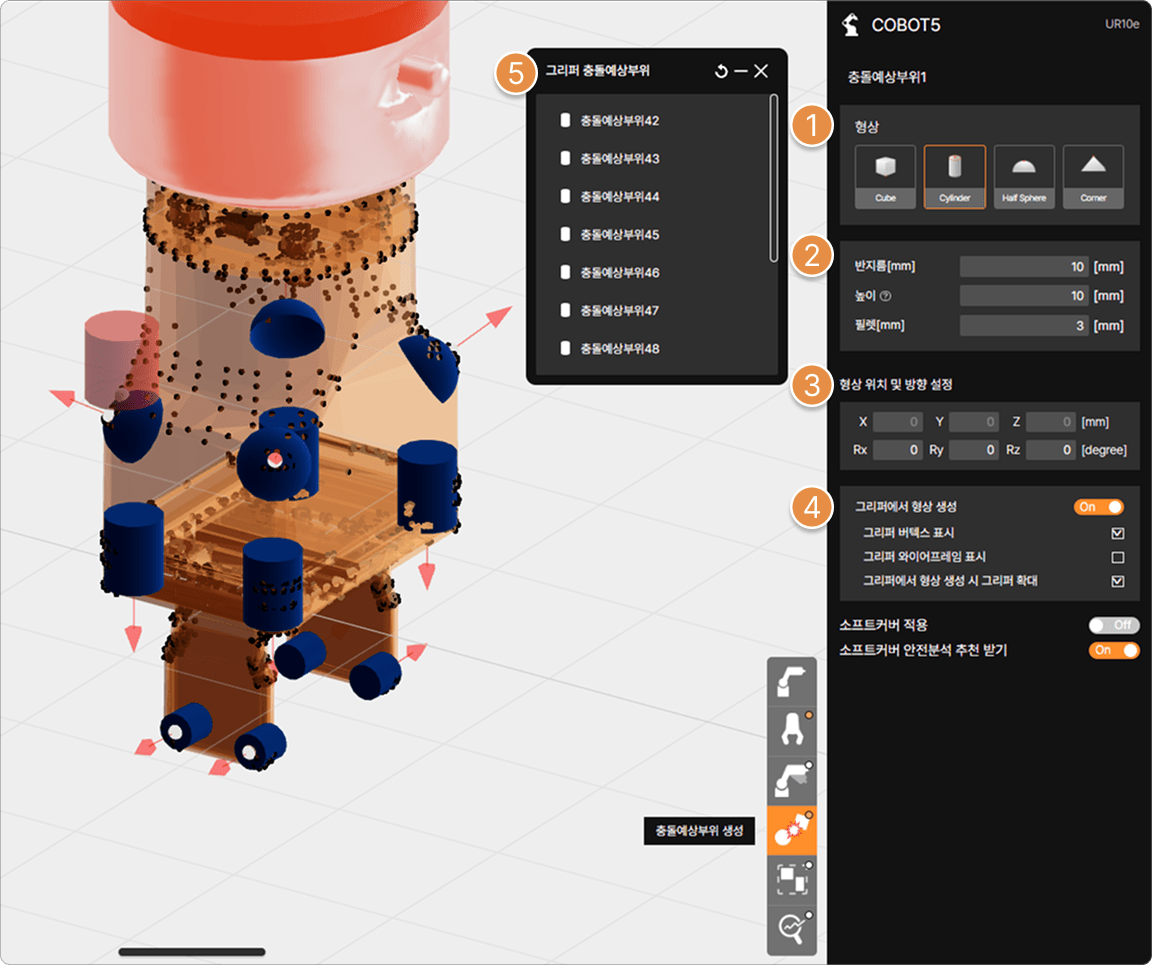
① 충돌예상부위 형상 선택
작업자와 그리퍼 또는 작업 대상물 간의 충돌예상부위를 표현할 형상을 선택합니다. 원하는 형상을 선택한 후, 3D 화면에서 원하는 위치를 마우스로 클릭하여 충돌예상부위를 생성합니다.
팁
충돌예상부위와 관련된 자세한 내용은 충돌예상부위란?을 참고하세요.
② 반지름, 사이즈(높이), 필렛 설정
생성한 형상의 반지름과 사이즈, 필렛의 크기를 설정할 수 있습니다. 사이즈 입력 기능은 일부 형상을 3D 화면에서 잘 보이게 하기 위한 편의 기능이며, 분석에는 영향을 주지 않습니다.
팁
형상 별로 입력 할 수 있는 값은 다음과 같습니다. Cube – 사이즈, 필렛 Cylinder – 반지름, 높이, 필렛 Half Sphere – 반지름 Corner – 사이즈, 필렛
③ 형상 위치 및 방향 설정
생성하고자 하는 충돌예상부위의 위치 및 방향을 입력합니다.
주의
충돌예상부위의 위치는 그리퍼의 원점 기준 -1000 mm ~ 1000 mm 까지 이동 가능하며 방향은 -180° ~ 180° 까지 입력 가능합니다.
④ 그리퍼에서 형상 생성
그리퍼 3D 모델 내에서만 충돌예상부위를 생성할 수 있게 설정합니다.
그리퍼 버텍스 표시 또는 그리퍼 와이어프레임 표시 기능을 이용하면 그리퍼 3D 모델의 모서리에 점과 와이어 프레임이 나타나기 때문에, 충돌예상부위를 쉽게 생성할 수 있습니다.
⑤ 충돌예상부위 정보
생성한 충돌예상부위의 목록을 확인할 수 있으며, 각 충돌예상부위를 선택하여 설정을 변경할 수 있습니다.
2-3. 모션 설정
로봇의 모션을 설정하는 두 가지 방법에 대해 알아봅니다.
2-3-1. 모션 설정 1 (모션 업로드)
모션 설정 메뉴 – 모션 업로드
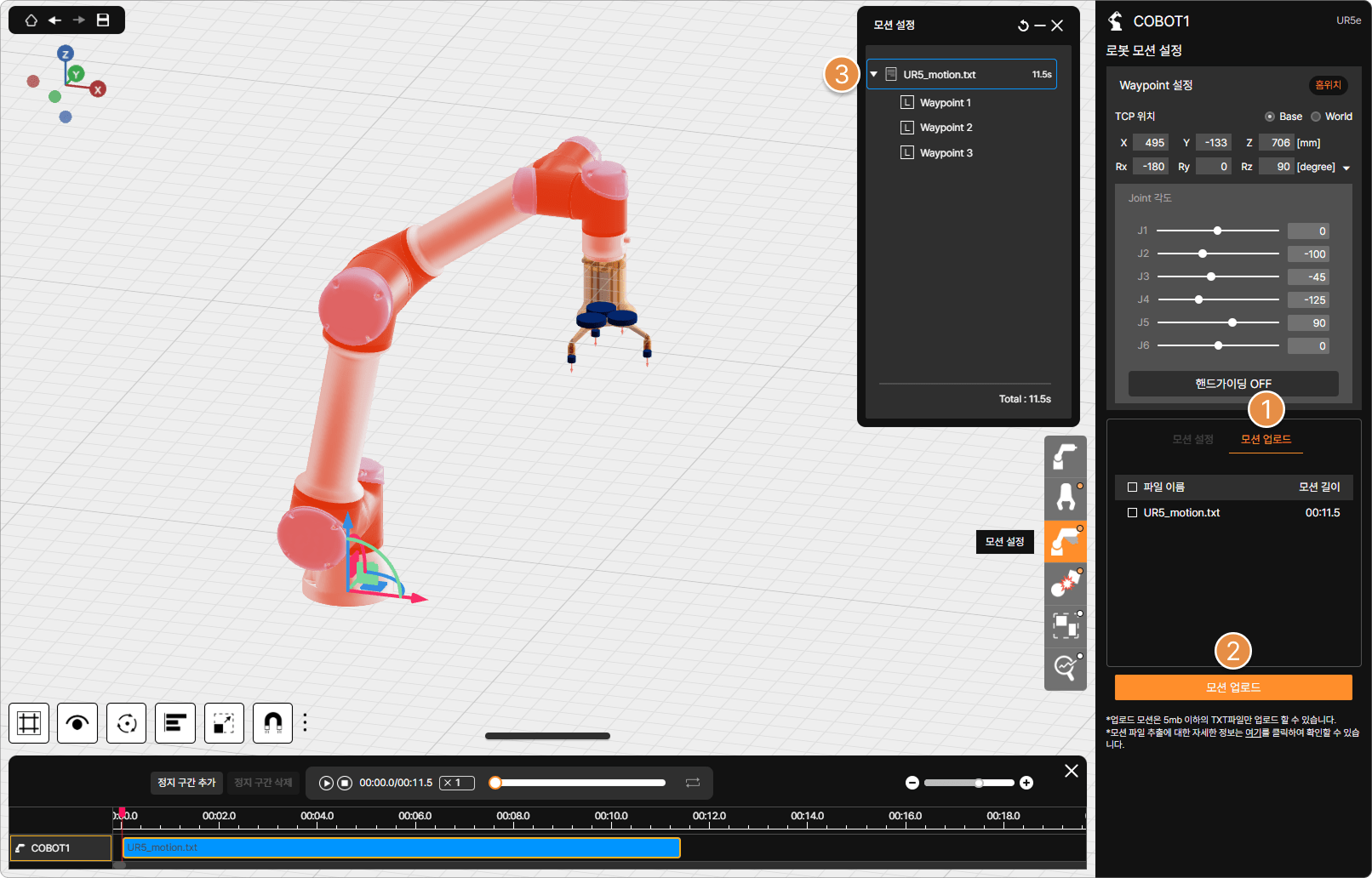
① 모션 업로드 탭
실제 로봇에서 추출한 모션 파일을 업로드할 수 있습니다.
팁
모션 추출과 관련된 자세한 내용은 모션 추출 프로그램 사용하기를 참고하세요.
② 로봇 모션 업로드
모션 추출 프로그램을 이용하여 추출한 *.txt 형식의 모션 파일을 업로드합니다.
③ Waypoint 목록
업로드한 모션 파일의 Waypoint 상세 정보를 확인할 수 있습니다.
주의
업로드한 모션의 Waypoint는 SafetyDesigner의 알고리즘으로 산출한 가상의 Waypoint 이므로, 실제 설정 값과 다를 수 있습니다.
2-3-2. 모션 설정 2 (모션 생성)
모션 설정 메뉴 – 모션 생성
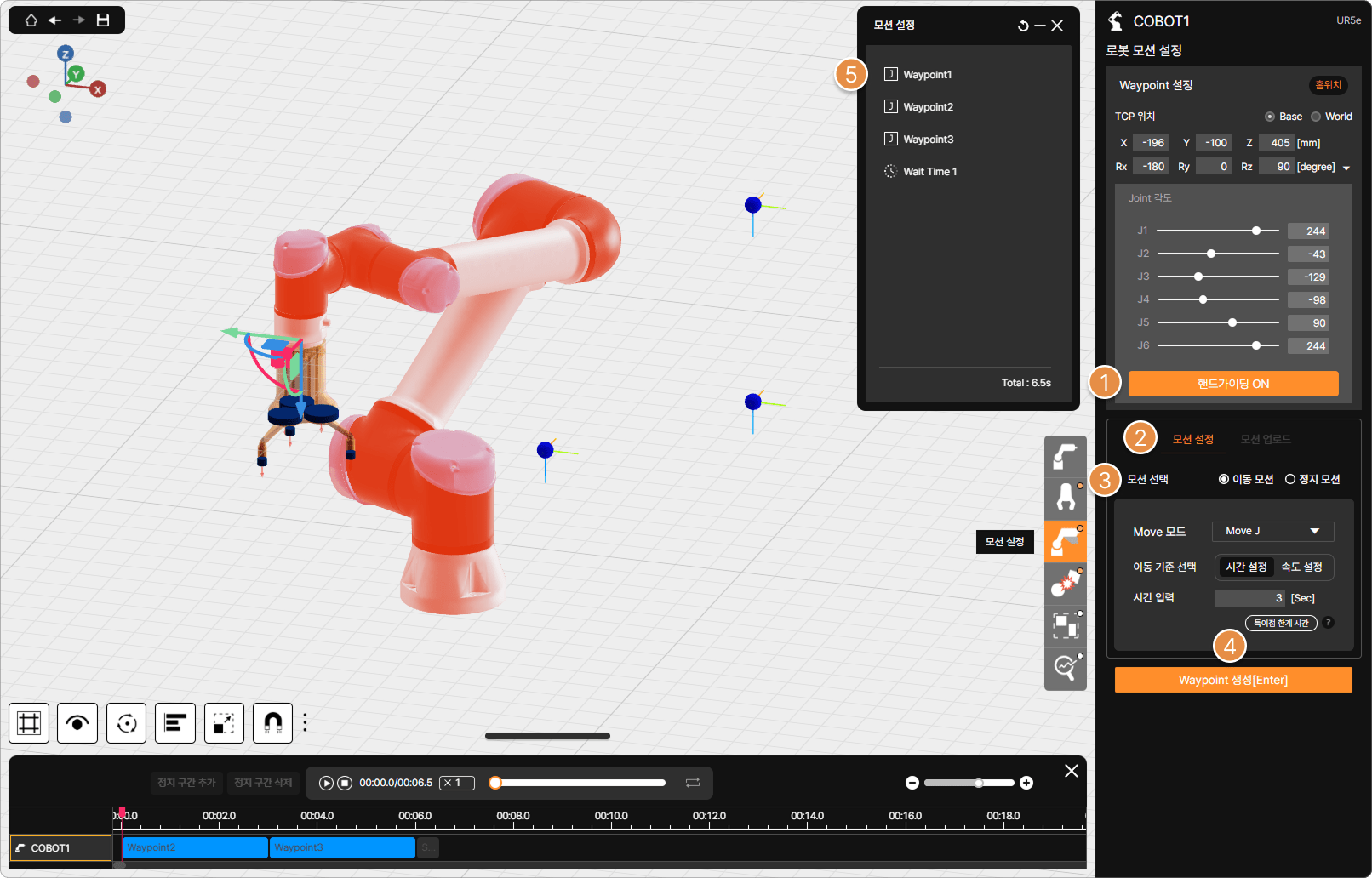
① 핸드가이딩 ON / OFF
핸드가이딩 상태를 ON으로 설정하면, 3D 화면에서 로봇을 교시(티칭)하여 Waypoint를 생성할 수 있습니다.
팁
일부 로봇은 기능 개발 상황에 따라 모션 생성(핸드가이딩 기능)이 불가능할 수 있습니다.
② 모션 설정 탭
모션 생성(Waypoint 설정) 메뉴로 진입합니다.
팁
모션 생성 기능을 이용하는 자세한 방법은 편리한 사용팁 페이지의 모션 생성이란?을 참고하세요.
③ 모션 선택
이동 모션 또는 정지 모션 중에 하나를 선택하여 Waypoint를 설정합니다.
④ Waypoint 생성
로봇의 현재 위치 값을 Waypoint로 저장하여 모션을 생성합니다. 생성한 Waypoint는 3D 화면에 파란점으로 표시됩니다.
⑤ Waypoint 목록
생성한 Waypoint와 정지 모션(Wait Time) 목록이 나타납니다. 각 Waypoint를 선택하여 설정을 변경할 수 있습니다.
3. 분석 정보 입력 (모바일 로봇)
팁
모바일 로봇에는 현재 협동로봇만 결합이 가능합니다.
3-1. 경로 설정
카테고리 메뉴 – 경로 설정
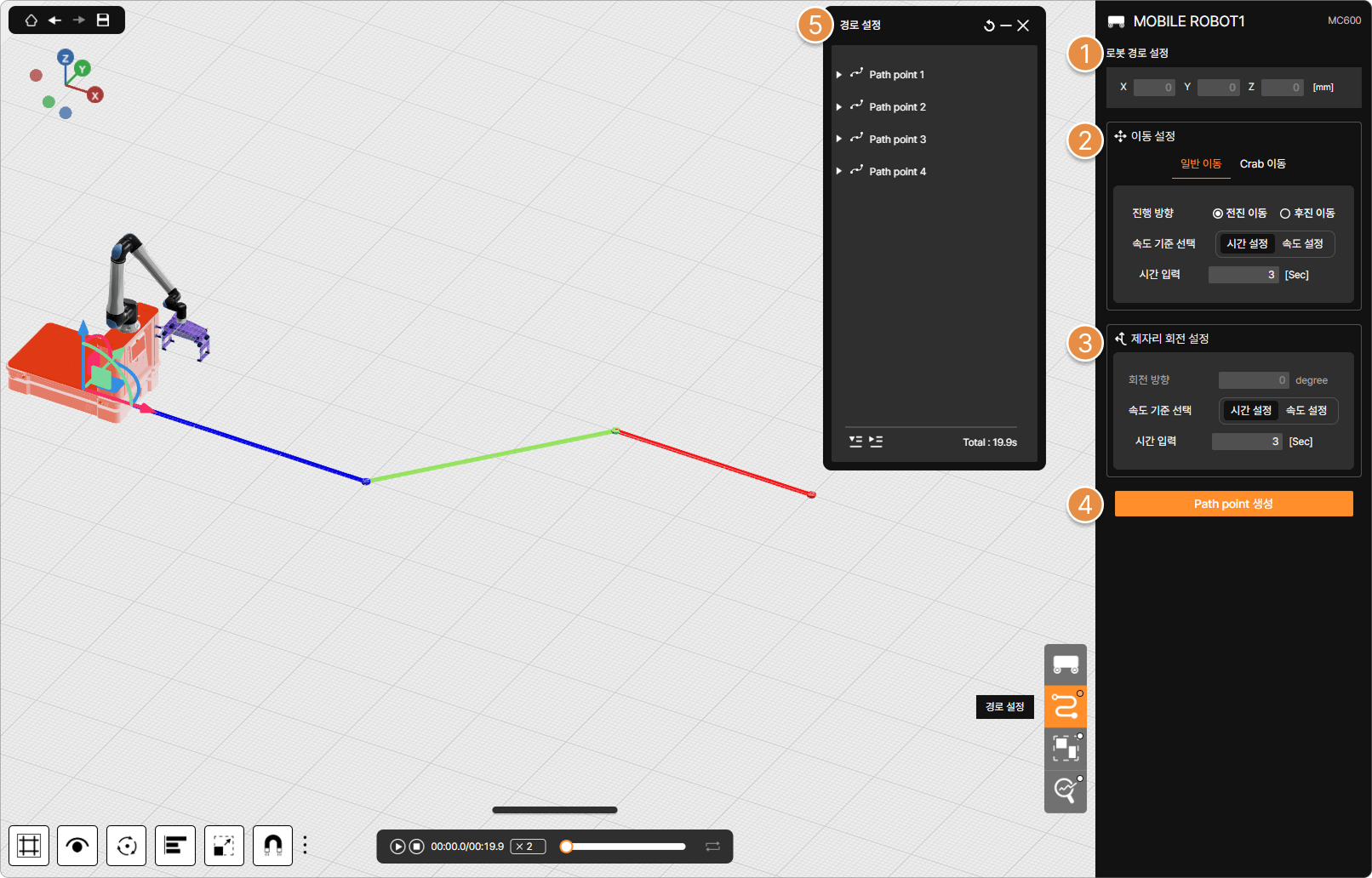
① 로봇 경로 설정
Path point 생성 버튼 클릭하여 경로 생성을 시작하면, 마우스 커서가 위치한 지점의 X, Y 좌표가 표시되며 이 좌표를 기준으로 Path point가 생성됩니다. 이미 생성된 Path Point를 클릭하면, 해당 메뉴에서 X, Y 좌표 값을 직접 입력하여 위치를 수정할 수 있습니다.
② 이동 설정
Path point 생성 시, 모바일 로봇의 이동 종류 (일반 이동 / Crab 이동), 진행 방향(전진 / 후진), 속도 기준(시간 / 속도)을 설정할 수 있습니다.
③ 제자리 회전 설정
모바일 로봇이 다음 지점으로 이동하기 전에 회전해야 하는 경우 (예: 전진에서 후진으로 상태 변경 시), 해당 회전 동작의 방향, 회전 속도 또는 회전 시간을 설정할 수 있습니다.
④ Path point 생성
위에서 설정한 값들을 바탕으로 Path Point를 생성하여 로봇의 이동 경로를 구성합니다. 생성 버튼을 클릭한 상태에서 3D 화면의 원하는 지점을 마우스로 클릭하면 연속적인 Path point를 만들 수 있습니다.
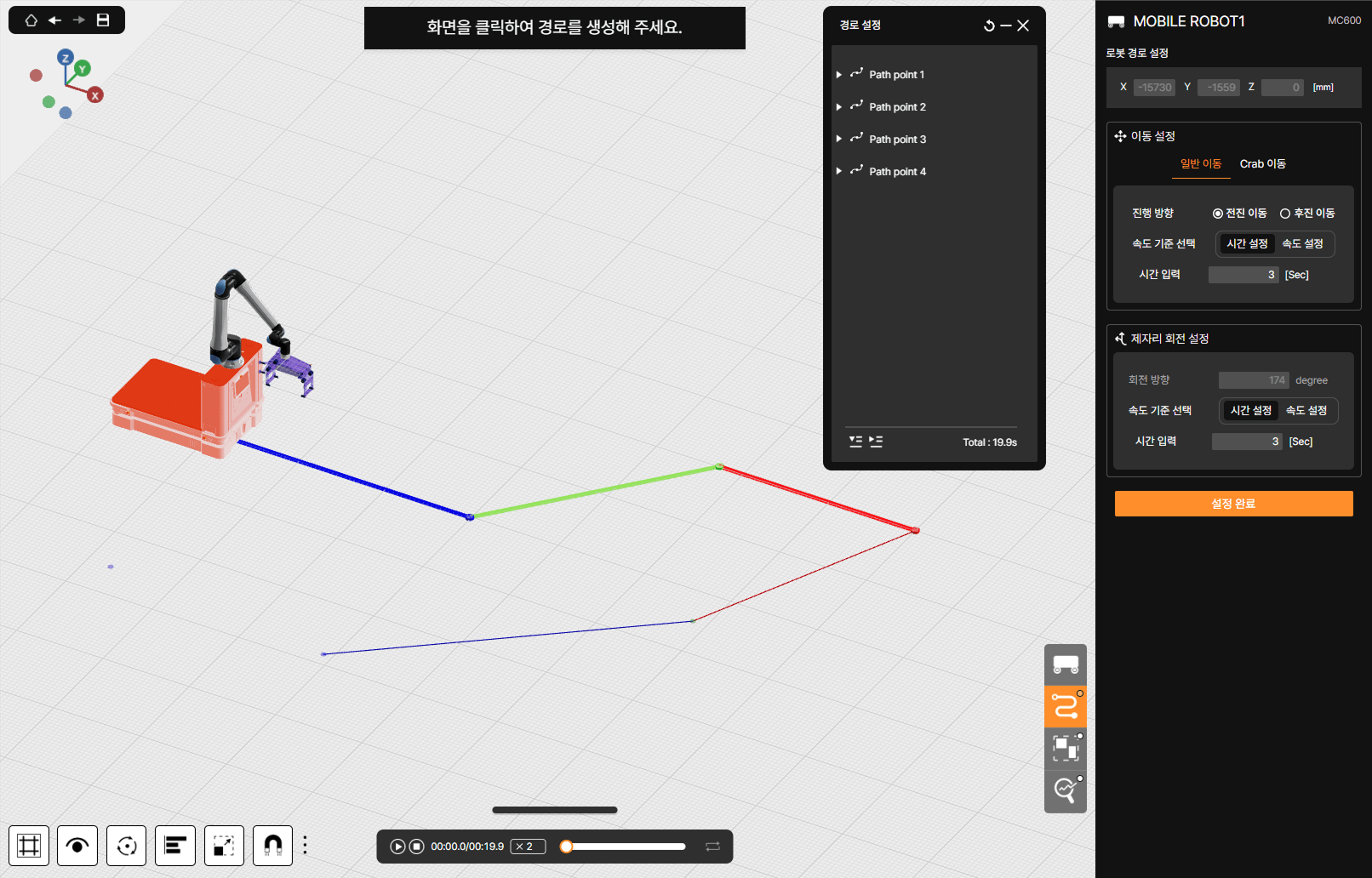
전진 경로는 파란색, 후진 경로는 빨간색, Crab 이동 경로는 녹색으로 표시됩니다.
⑤ Path point 목록
선택된 모바일 로봇의 Path point 목록이 표시됩니다.
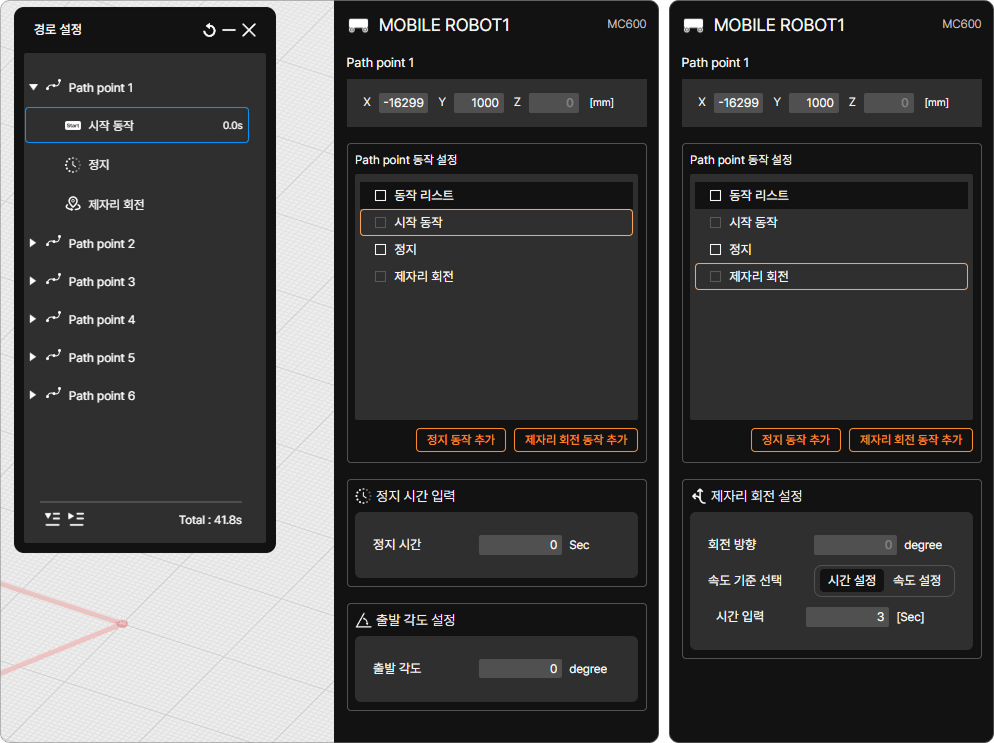
각 Path point 왼쪽의확장/축소 버튼(▼)을 클릭하면, 해당 지점까지의 이동 및 관련 동작의 상세 설정을 수정할 수 있는 메뉴가 화면 오른쪽에 나타납니다.
4. 협동작업공간 설정
협동작업공간은 로봇과 사람이 협동 응용을 위해 공유하는 작업공간을 뜻합니다.
협동작업공간 설정 시, 물리적 수단(예: 펜스, 광전자식 방호장치 등)을 설치하여 로봇으로의 접근 가능성이 원천 차단되지 않았다면, 로봇의 모든 운전영역에 대해 빈틈없이 협동작업공간이 설정되어야 합니다. 또한, 로봇의 운전영역이 아닌 빈 공간에 협동작업공간을 설정하여 분석 결과의 CRI 값이 0으로 계산되는 협동작업공간이 존재해서는 안됩니다.
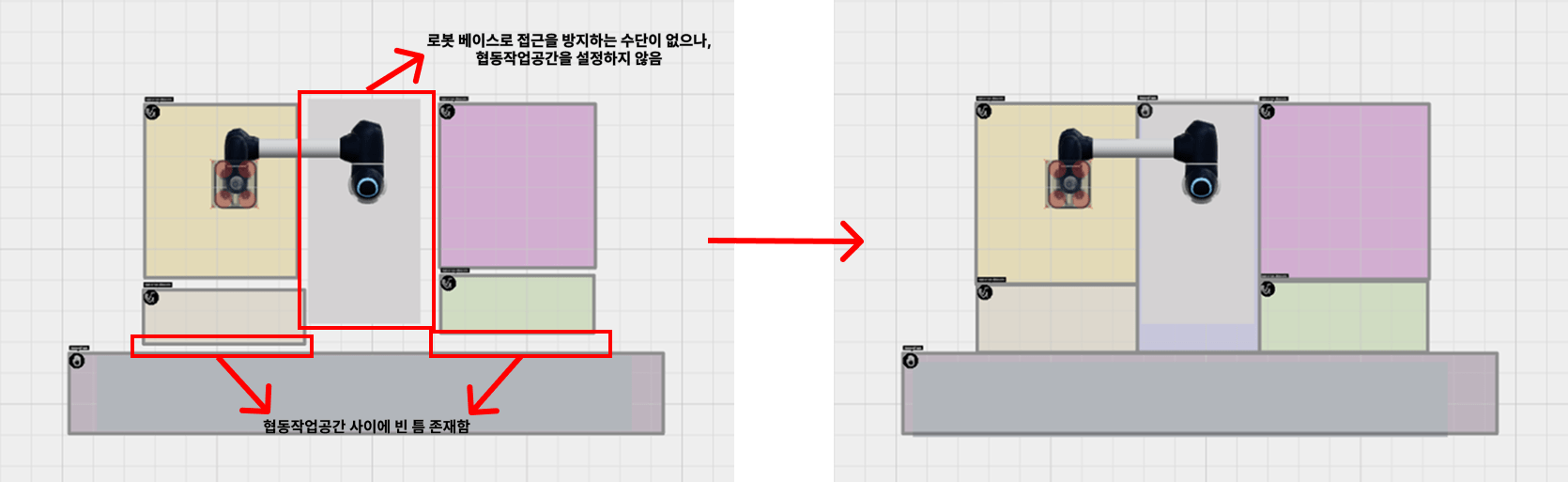
협동작업공간 설정 오류 예시
아래에서는 협동작업공간 설정 메뉴의 구성에 대해 알아봅니다.
카테고리 메뉴 – 협동작업공간 설정
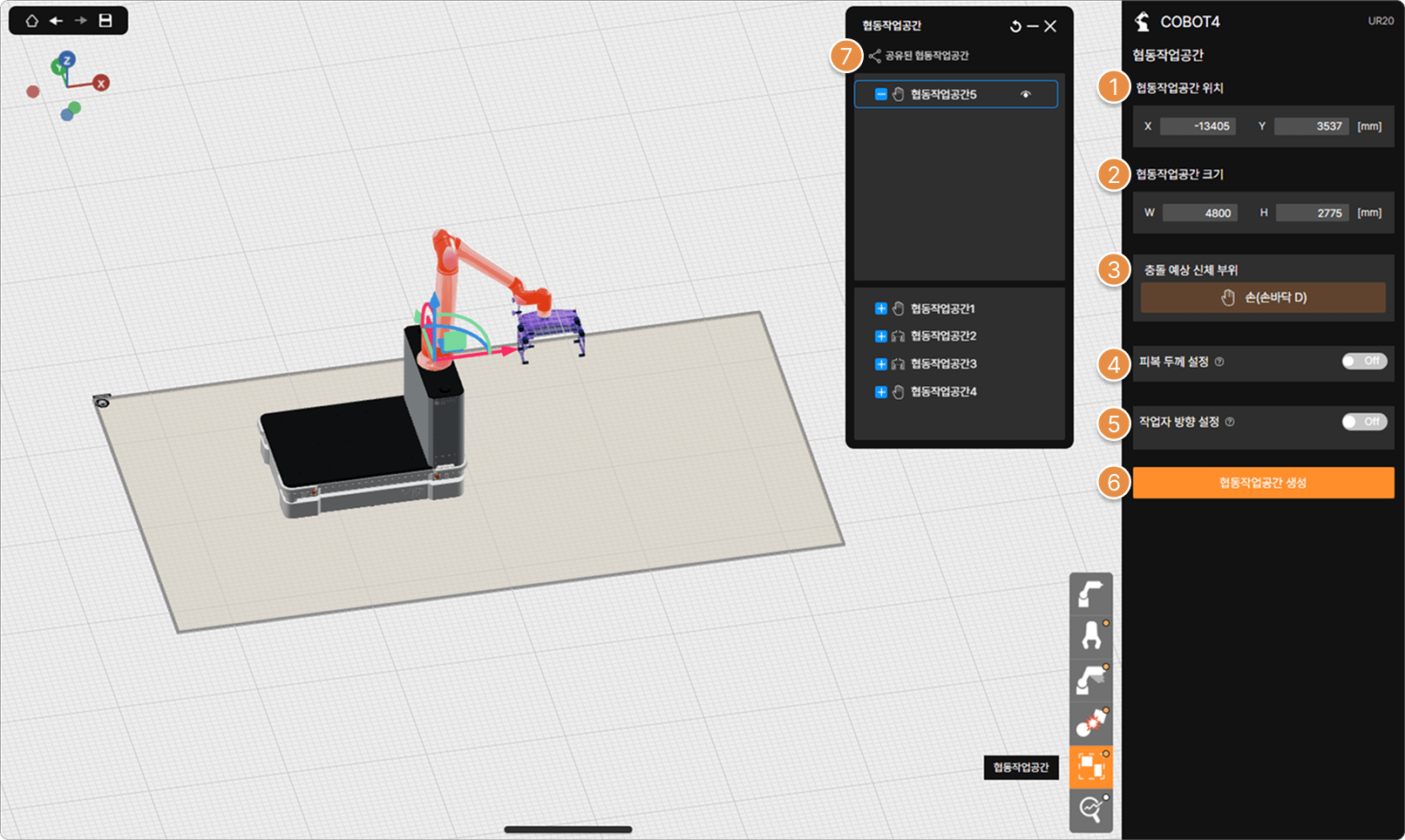
① 협동작업공간 위치
협동작업공간의 위치(mm)를 입력합니다.
팁
협동작업공간의 위치는 -20000 mm ~ 20000 mm 까지 이동이 가능합니다.
② 협동작업공간 크기
협동작업공간의 크기(mm)를 입력합니다.
팁
협동작업공간의 크기는 150 mm ~ 10000 mm 까지 입력이 가능합니다.
③ 충돌 예상 신체 부위
협동작업공간에서 로봇과 작업자의 충돌이 일어날 것으로 예상되는 신체 부위를 설정합니다. 협동작업공간을 생성할 때는 기본 신체 부위가 손(손바닥)으로 고정되어있으며, 협동작업공간 수정 시 신체 부위를 변경할 수 있습니다.
주의
표준(ISO/TS 15066, KOROS 1162-1)에서는 머리의 동적 충돌을 허용하지 않습니다.
팁
충돌 예상 신체 부위의 종류는 아래와 같습니다. – 손 (손바닥) – 가슴 (흉골) – 상완 (삼각근) – 전완 (전완근) – 대퇴 (대퇴근)
④ 피복 두께 설정
해당 협동작업공간 위치에서 작업하는 사람이 설정한 두께 만큼의 피복을 착용한 상태를 가정하고 분석합니다.
팁
피복 두께는 1 mm ~ 2 mm 까지 입력 가능합니다.
⑤ 작업자 방향 설정
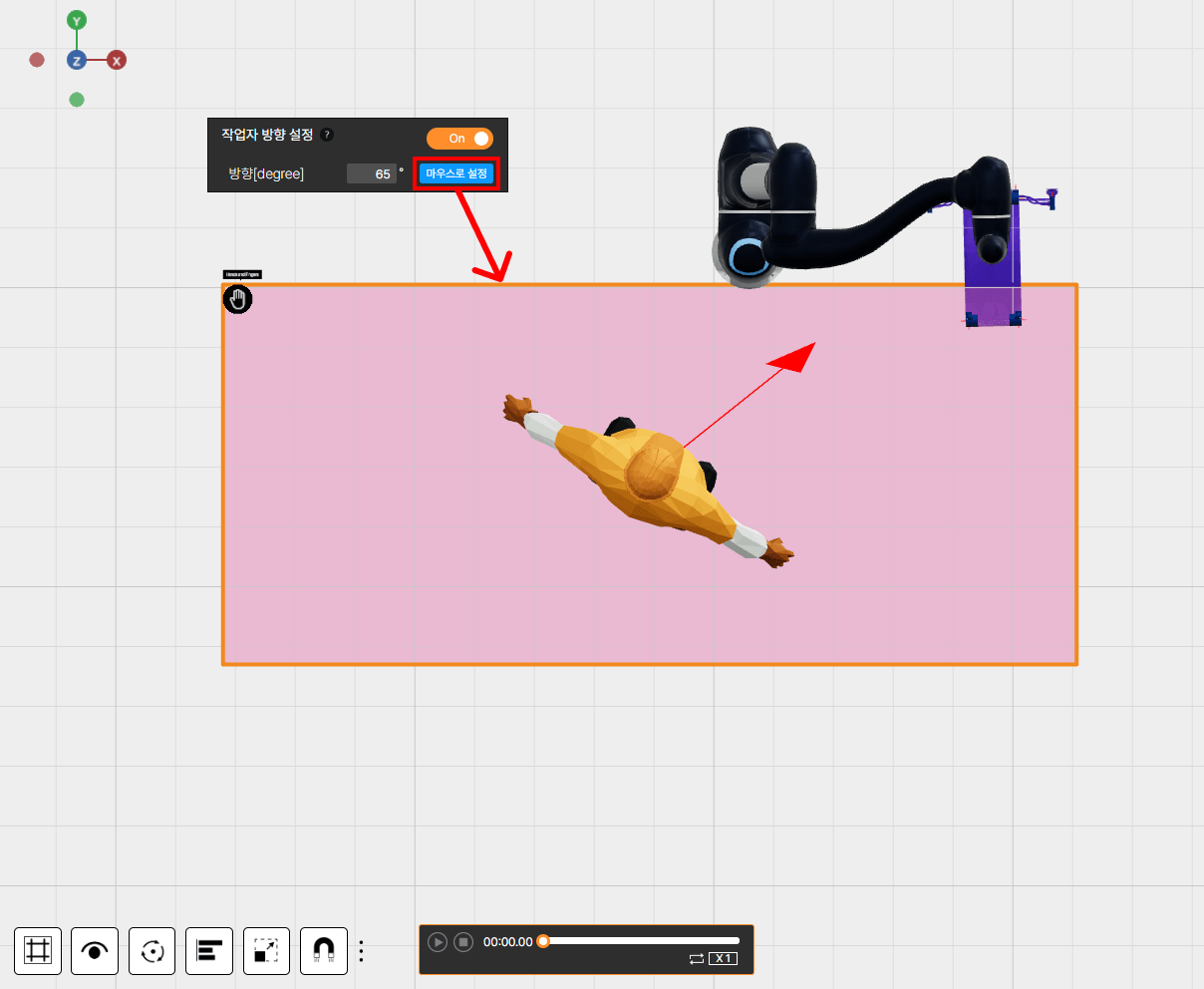
실제로 발생할 수 있는 충돌만 계산하기 위해, 작업자가 협동작업공간에서 작업할 때 바라보는 방향을 설정합니다. 마우스로 설정 버튼을 클릭하면 협동작업공간에 작업자 모델이 나타나며, 원하는 방향으로 회전하여 작업자 방향을 설정할 수 있습니다.
작업자 방향 설정 기능이 적용된 협동작업공간에서는, 내부 알고리즘에 따라 충돌 예상 신체 부위 중 ‘가슴’과 ‘상완’이 단일 부위로 통합되어 분석됩니다.
⑥ 협동작업공간 생성
3D 화면에서 협동작업공간을 설정합니다. 협동작업공간은 3D 화면의 바닥 영역을 드래그하여 직사각형 형태로 설정합니다.
⑦ 협동작업공간 목록
협동작업공간을 선택한 어느 로봇의 분석에 포함할 지 체크할 수 있습니다. 협동작업공간 왼쪽의 + / – 버튼을 클릭하면 현재 선택한 로봇에 해당 협동작업공간을 포함하거나 제외할 수 있습니다.
팁
여러 로봇이 하나의 협동작업공간을 공유하여 사용할 수 있습니다.
5. 분석 옵션
카테고리 박스 – 분석 옵션
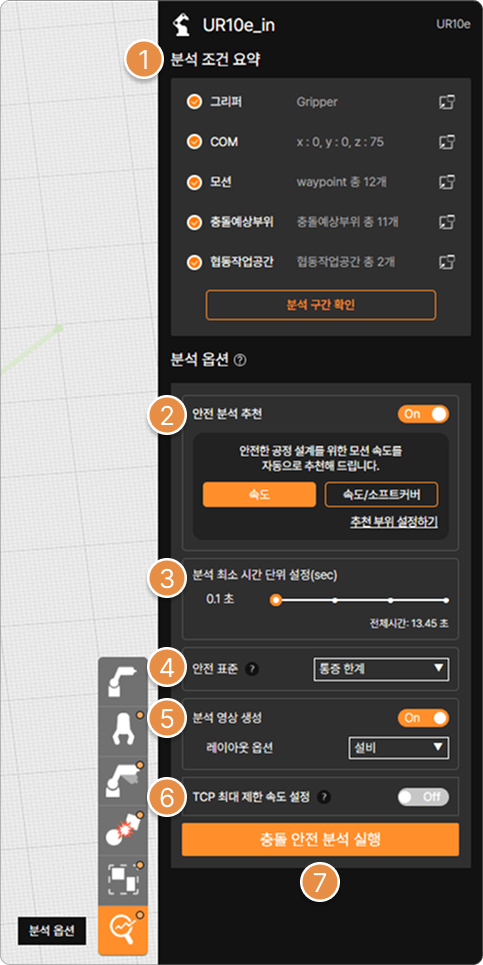
① 분석 조건 요약
선택한 로봇에 입력한 분석 정보가 나열됩니다. 분석 조건 입력이 완료된 항목 왼쪽에 주황색 체크 버튼이 표시됩니다.
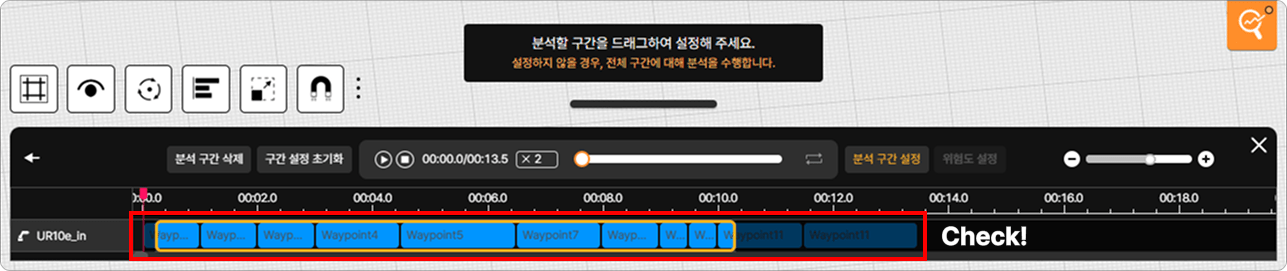
분석 구간 확인 버튼을 클릭하면 화면 하단에 로봇 모션 중 어느 구간을 선택하여 분석할 지 드래그하여 지정할 수 있습니다.
② 안전 분석 추천
분석 결과를 바탕으로, 로봇 모션 구간 별 가속 / 감속 수치와 소프트커버 적용 여부 등을 추천합니다. 안전 분석 추천 기능은 모바일 로봇 또는 모바일 로봇과 결합된 협동 로봇에는 적용되지 않습니다.
팁
안전 분석 추천 기능의 자세한 사용법은 안전 분석 추천 기능이란?을 참고하세요
③ 분석 최소 시간 단위 설정
분석 시간 단위를 선택할 수 있습니다. 값이 작아질수록 정확한 분석 결과가 나오며 분석 시간은 길어집니다.
주의
충돌안전분석 보고서 출력 시 반드시 분석 최소 시간 단위를 0.1초로 설정해야 합니다.
④ 안전 표준 선택
충돌안전분석에 적용할 표준을 선택합니다.
팁
각 표준은 아래와 같습니다. – 통증 한계(KOROS 1162-1) : 사람이 견딜 수 있는 통증의 최고 수치를 기반으로 분석을 실행합니다. – 통증 시작(ISO/TS 15066) : 사람이 통증을 처음 느끼기 시작하는 수치를 기반으로 분석을 실행합니다.
⑤ 분석 영상 생성 및 레이아웃 옵션
분석 시 영상 생성 여부를 선택합니다. 분석 영상 생성을 선택하면 분석에 추가 시간이 소요됩니다.
주의
충돌안전분석 보고서는 분석 영상을 모두 생성하지 않으면 발급할 수 없습니다.
또한, 분석 영상에 출력할 요소를 도면 또는 설비 중 선택합니다.
⑥ TCP 최대 제한 속도 설정
로봇 모션 중, TCP(Tool Center Point)의 최대 속도를 입력한 값으로 설정하여 충돌안전분석을 진행합니다.
⑦ 충돌안전분석 실행
입력한 정보와 설정된 분석 옵션을 적용해 분석을 실행합니다. 분석 소요 시간은 모션 길이에 비례해 증가합니다.