1. 로봇 정보 입력
공정 만들기 페이지에서 생성한 공정을 더블 클릭하여 공정 설계 화면으로 진입한 후, 3D 화면 왼쪽의 라이브러리에서 분석에 사용할 로봇을 선택하여 화면에 배치합니다.
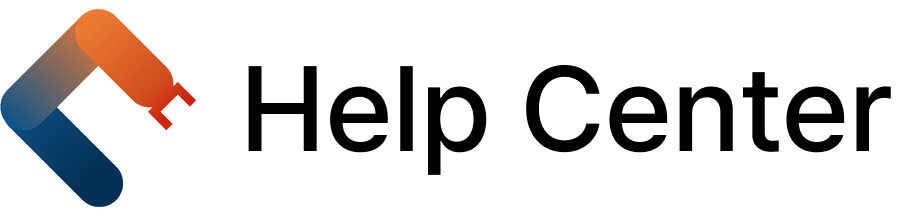
로봇 만들기
① 로봇 선택
3D 화면 좌측의 라이브러리 메뉴에서 화면에 배치할 로봇 종류를 선택합니다.
② 로봇 제조사 및 로봇 모델 선택
드롭다운 메뉴에서 로봇 제조사를 선택한 후, 해당 제조사의 로봇 모델을 선택합니다.
③ 3D 화면에 로봇 배치
로봇 모델을 선택하면, 3D 화면의 원하는 위치에 로봇을 배치할 수 있는 상태가 되며, 마우스 왼쪽 버튼을 클릭하면 선택한 위치에 로봇을 배치합니다.
✅ 사용할 수 있는 로봇 모델은 어떤 것들이 있나요?
- SafetyDesigner에 등록된 로봇 모델은 아래와 같습니다. 로봇 모델은 계속 추가될 예정이며, 충돌안전분석 기능은 협동로봇과 모바일 로봇에 적용할 수 있습니다.
<협동로봇>
모션 생성이 불가능한 로봇은 빨간색으로 표시됩니다.
| 로봇 제조사 | 모델명 |
| Universal Robot | UR3, UR3e, UR5, UR5e, UR8 Long, UR10, UR10e, UR16e, UR20, UR30 |
| Doosan Robotics | A0509, A0912, E0509, M0609, M0617, M1013, M1509, H2017, H2515, P3020 |
| Neuromeka | Indy7, Indy7-V2, Indy12, Indy12-V2, Indy-RP2, Indy-RP2-V2, Nuri-CR20, NURI-SR3, NURI-SR4, OPTI5 |
| Rainbow Robotics | RB3-730, RB3-1200, RB5-850, RB10-1300, RB16-900, RB20-1900ES |
| Techman Robot | TM5-700, TM5-900, TM12, TM14, TM14S, TM16, TM20MX |
| Hanwha Robotics | HCR-5A, HCR-12A, HCR-10L, HCR-14 |
| FANUC | CRX-10iA, CRX-10iA/L, CRX-20iA/L, CRX-25iA, CRX-30iA, CR-35iB |
| Hyundai Wia | HW1513 |
| PULOON | SYMPHONY5, SYMPHONY10, SYMPHONY15, SYMPHONY25, SYMPHONY40, SYMPHONY40L |
| LG | CLOi COBOT5 |
| Atom Robot | AM-20, AM-30 |
| SIASUN | GCR25-1800 |
| Elite | ARC S3, ARC S12, ARC S20, ARC S25 |
| ABB | GoFa10 |
| DOBOT | CR10A, CR10V, CR20A |
| FAIRINO | FR3, FR5, FR10, FR30 |
| KUKA | LBR iiwa 14 |
| JAKA | Zu 12, Zu 20 |
<산업용 로봇>
| 로봇 제조사 | 모델명 |
| ABB | IRB 1600-6/1.2, IRB 2400/10, IRB 4600-20/2.5, IRB 6700-150/3.20 LeanID, IRB 7600-150/3.5 |
| KUKA | KR 4 R600, KR 20 R3100, KR 120 R1800 nano, KR 150 R2700-2, KR 360 R2800-2 |
| KAWASAKI | BA006L, BX130X, BX200L, RS007L, RS015X |
| YASKAWA | AR1440, AR2010, GP12, GP50, GP180 |
| FANUC | ARC Mate 100iD, LR Mate 200iD, M-710iC/50, R-1000iA/80F, R-2000iC/165F |
<모바일 로봇>
| 로봇 제조사 | 모델명 |
| Robotnik | RB-KAIROS |
| OMRON | HD1500, LD60, LD250 |
| MiR | M250, M600, MC250, MC600 |
2. 로봇 배치 확인
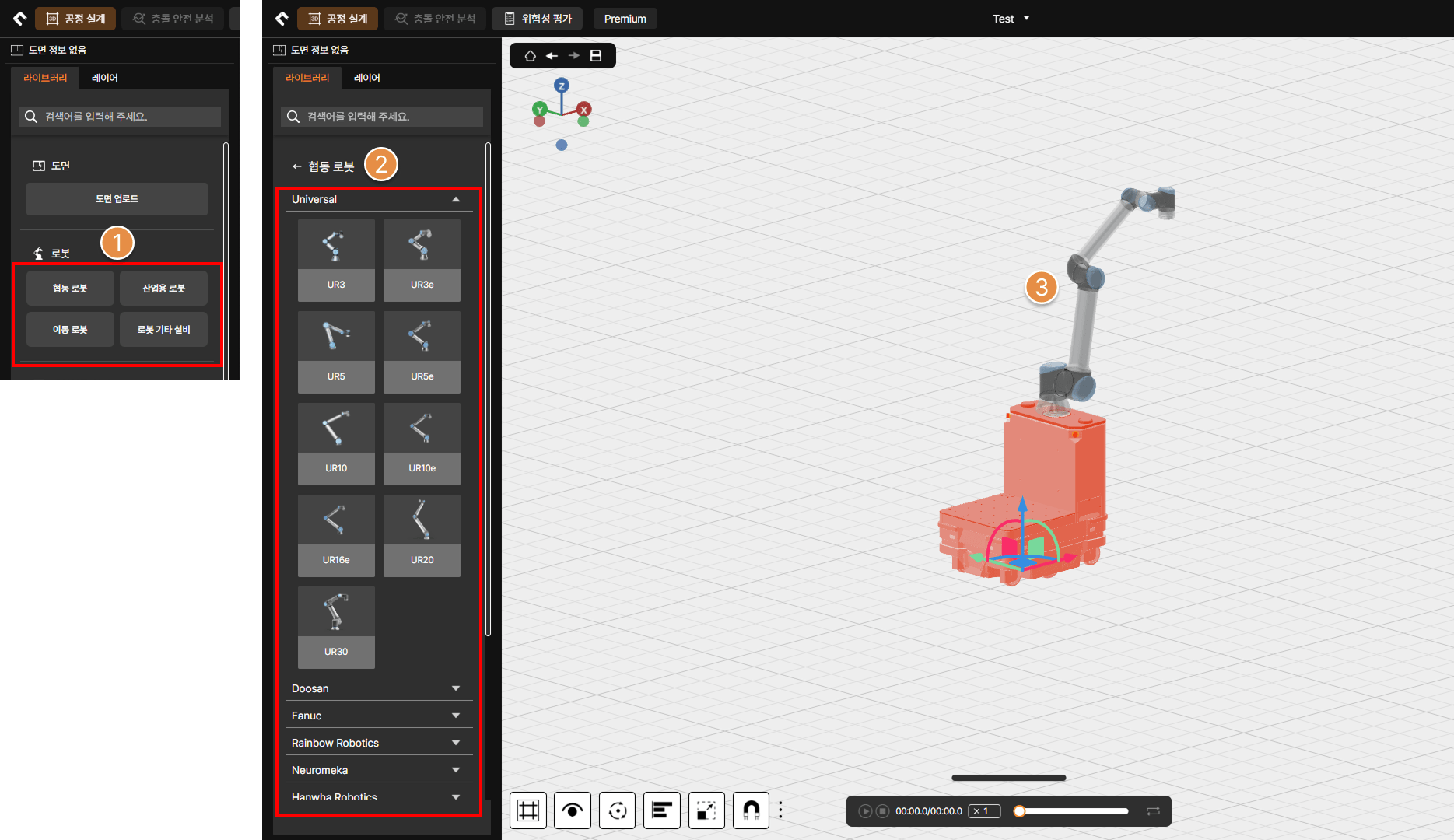
로봇을 3D 화면에 배치하였다면, 3D 화면 오른쪽 창에 로봇 정보가 출력됩니다.
3D화면에 로봇이 배치된 상태
① 로봇 위치 및 방향 설정
3D 화면에 있는 피봇 컨트롤러 또는 화면 오른쪽의 정보 창을 통해 로봇의 위치와 방향을 설정합니다.
주의
로봇 위치는 -20000mm ~ 20000mm 까지 이동 가능하며 회전은 -180° ~ 180° 까지 입력 가능합니다.
3. 로봇 수정 및 삭제
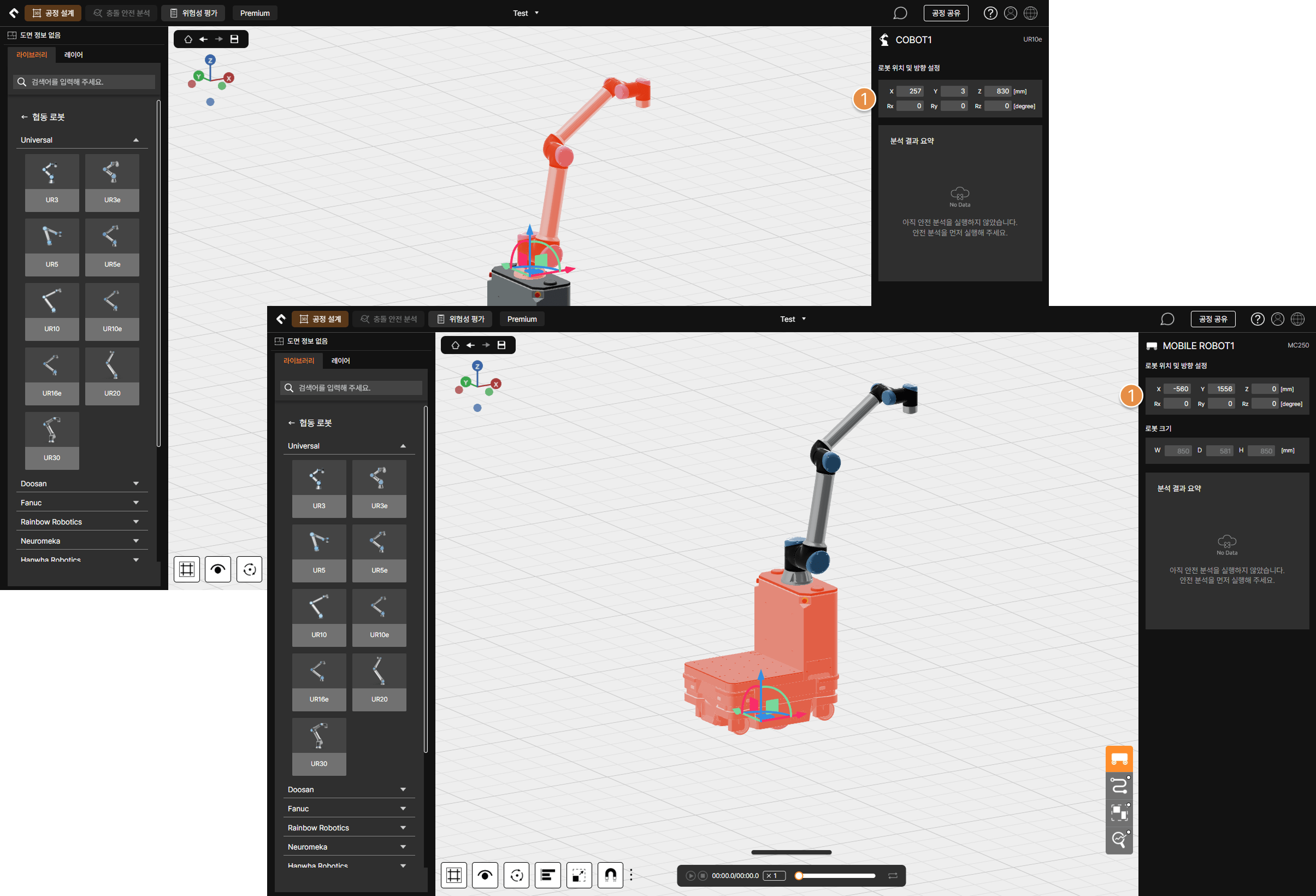
3D 화면에서 로봇을 마우스 오른쪽 버튼을 누르면 로봇의 정보를 수정하거나 삭제할 수 있습니다.
로봇 배치 – 3D 화면에서 로봇을 마우스 오른쪽 클릭한 상태
① 코멘트
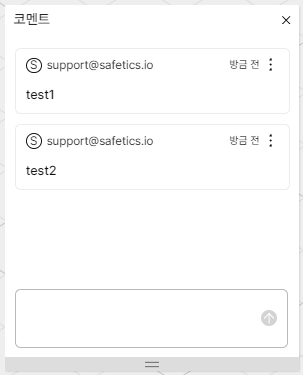 선택한 로봇에 작성된 코멘트를 확인합니다.
선택한 로봇에 작성된 코멘트를 확인합니다.
② 복사
선택한 로봇과 동일한 정보를 가진 로봇을 복사하여 3D 화면에 배치합니다.
③ 핸드가이딩
협동로봇을 교시가 가능한 상태로 변경합니다.
로봇 핸드가이딩 모드
피봇 컨트롤러를 클릭한 상태로 드래그하면 로봇의 실시간 이동이 가능하며 지정한 위치는 모션 생성 기능에 이용할 수 있습니다.
④ 도달 가능 영역 보이기
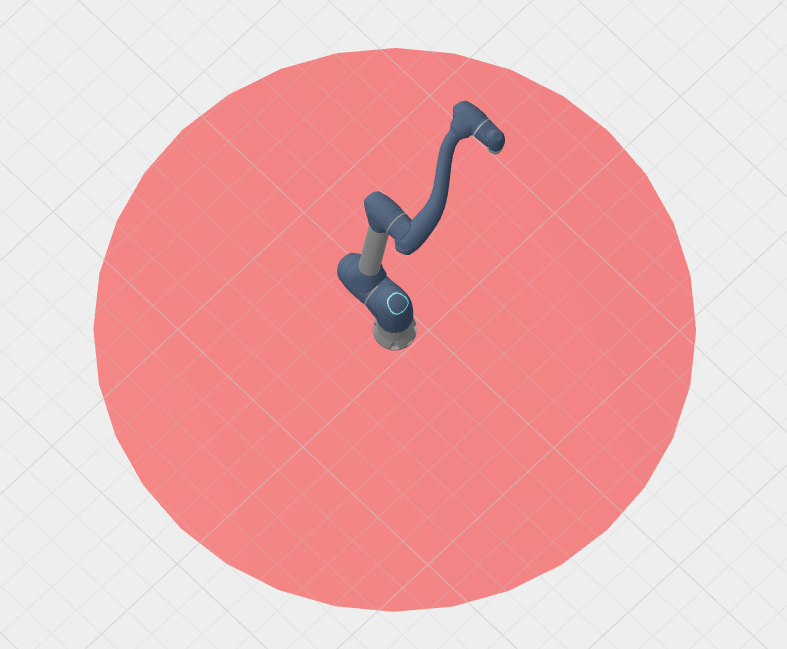
도달 가능 영역 표시
선택한 로봇 모델의 공구중심점(Tool Center Point, TCP) 최대 도달 영역이 표시됩니다.
⑤ 잠금
해당 로봇을 3D 화면에서 마우스 클릭이 되지 않도록 잠금 상태로 변경합니다. 잠금 상태의 로봇은 화면 왼쪽의 레이어 창에서 자물쇠 버튼을 클릭하면 잠금 해제할 수 있습니다.
⑥ 숨기기
3D 화면에서 로봇 또는 설비 등을 보이지 않도록 설정합니다.
⑦ 로봇 정보 수정
선택한 로봇의 이름을 수정하거나 다른 제조사의 로봇 또는 다른 로봇 모델로 변경할 수 있습니다.
⑧ 툴 체인지(다공정)
업로드한 로봇 모션에 따라 여러 개의 툴(엔드이펙터 및 그리퍼) 모델을 등록하여, 모션 구간마다 로봇의 말단장치를 변경하여 분석할 수 있습니다.
⑨ 삭제
로봇을 삭제합니다.
주의
보고서를 출력(또는 출력 승인 대기중)한 로봇은 삭제할 수 없습니다.
로봇 마우스 오른쪽 클릭 – 화면 요소가 겹쳐진 상태
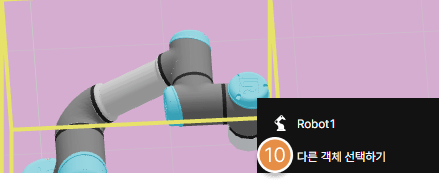
⑩ 다른 객체 선택
3D 화면에서 로봇, 설비, 협동작업공간 등 여러 객체가 동일한 선상에 존재하는 경우 마우스 오른쪽 버튼을 클릭하면 다른 객체 선택하기 버튼이 나타납니다. 다른 객체 선택하기를 클릭하면 3D 화면에서 여러 요소가 겹쳐져 클릭하기 어려운 경우에도 원하는 요소를 편리하게 선택할 수 있습니다.