1. 3D 화면 기본 구성
 1234567891012131415
1234567891012131415
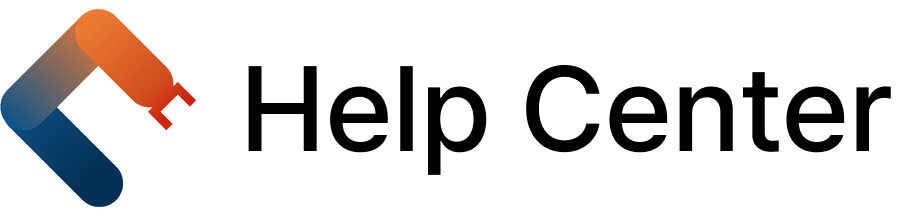
3D 화면 기본 구성
① 3D 화면 조작
– 객체 선택 : 3D 화면의 요소를 마우스 왼쪽 버튼을 클릭하여 선택합니다.
팁
객체에는 로봇, 그리퍼, 충돌예상부위, 설비, 생성한 모션의 Waypoint, 협동작업공간이 있습니다.
– 평행 이동 : 마우스 오른쪽 버튼을 누른 상태에서 마우스 이동 시 평행 이동을 합니다.
– 회전 이동 : 마우스 휠 버튼을 누른 상태에서 마우스 이동 시 회전 이동을 합니다.
– 확대 / 축소 : 마우스 휠 버튼을 회전하면 화면의 중심을 기준으로 화면을 확대 / 축소 합니다.
② 빠른 뷰 보기
6개의 뷰 (상, 하, 좌, 우, 앞, 뒤) 중 하나를 선택하여 화면을 확인합니다.
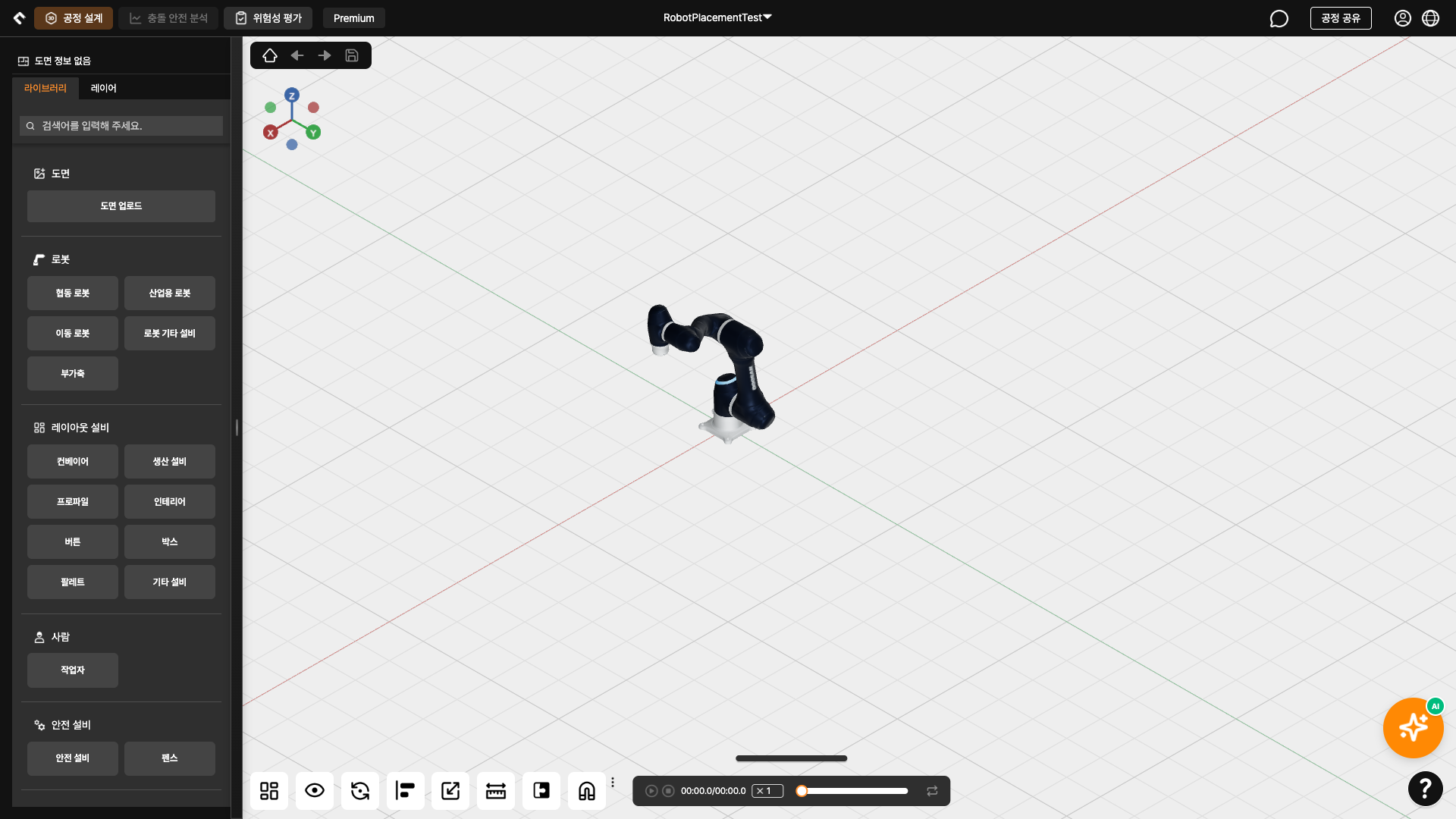
③ 그리드 크기 설정 / 배경색 설정
그리드의 눈금 간격을 세가지 (50mm, 100mm, 200mm) 중 하나를 선택하여 조정하거나, 3D 화면의 배경색을 기호에 맞게 설정합니다.
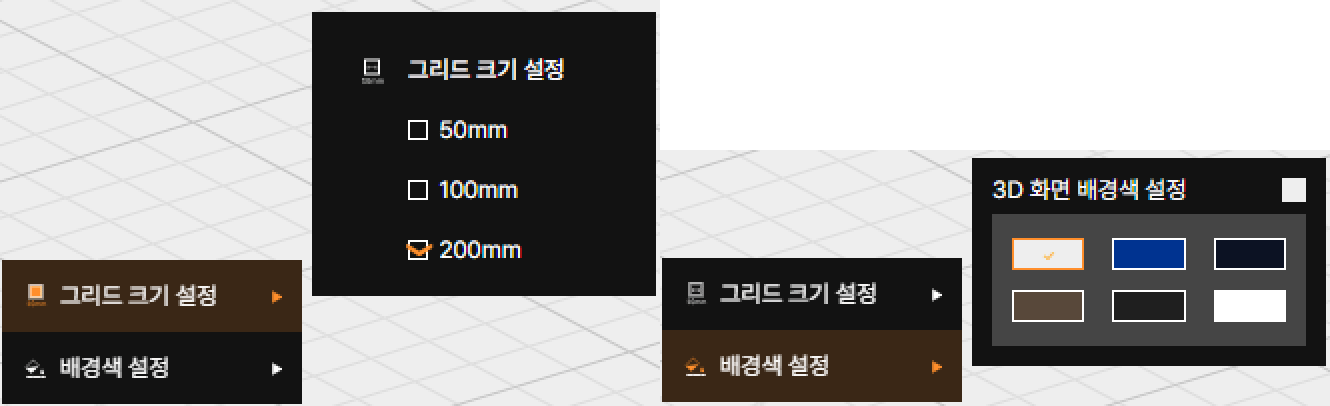
④ 보기모드
안전분석, 설계, 레이아웃 카테고리별로 3D 화면에 표시할 요소를 보이거나 숨길 수 있습니다.
⑤ 회전점 설정
3D 화면 조작 시 화면 회전을 할 기준점을 선택합니다.
⑥ 객체 정렬
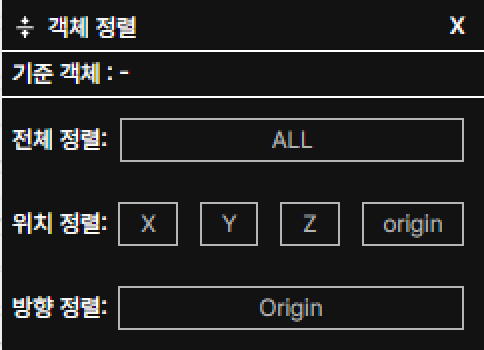
3D 화면에 배치한 요소 중, 나중에 선택한 객체(Ctrl 키를 누른 상태로 클릭하여 선택한 객체)의 좌표 위치 또는 객체가 바라보는 방향이 처음에 선택한 객체(기준 객체)와 일치하도록 전체 정렬(ALL), 위치 정렬(X, Y, Z, origin), 방향 정렬(Origin)을 수행합니다.
⑦ Scale
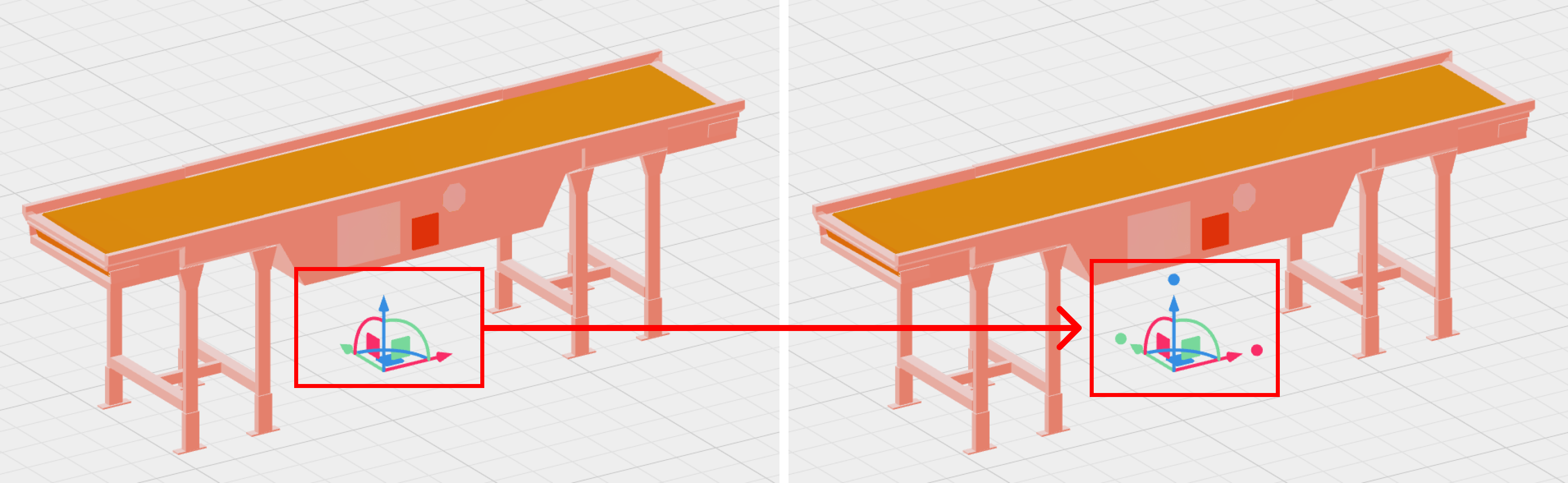
Scale 버튼을 클릭하면 3D 화면에 배치된 설비의 크기를 마우스 드래그로 조정할 수 있습니다. 화살표 끝에 표시된 점을 마우스 왼쪽 버튼으로 클릭한 상태로 드래그하면 해당 방향으로 크기를 늘리거나 줄일 수 있습니다.
⑧ 수치 측정
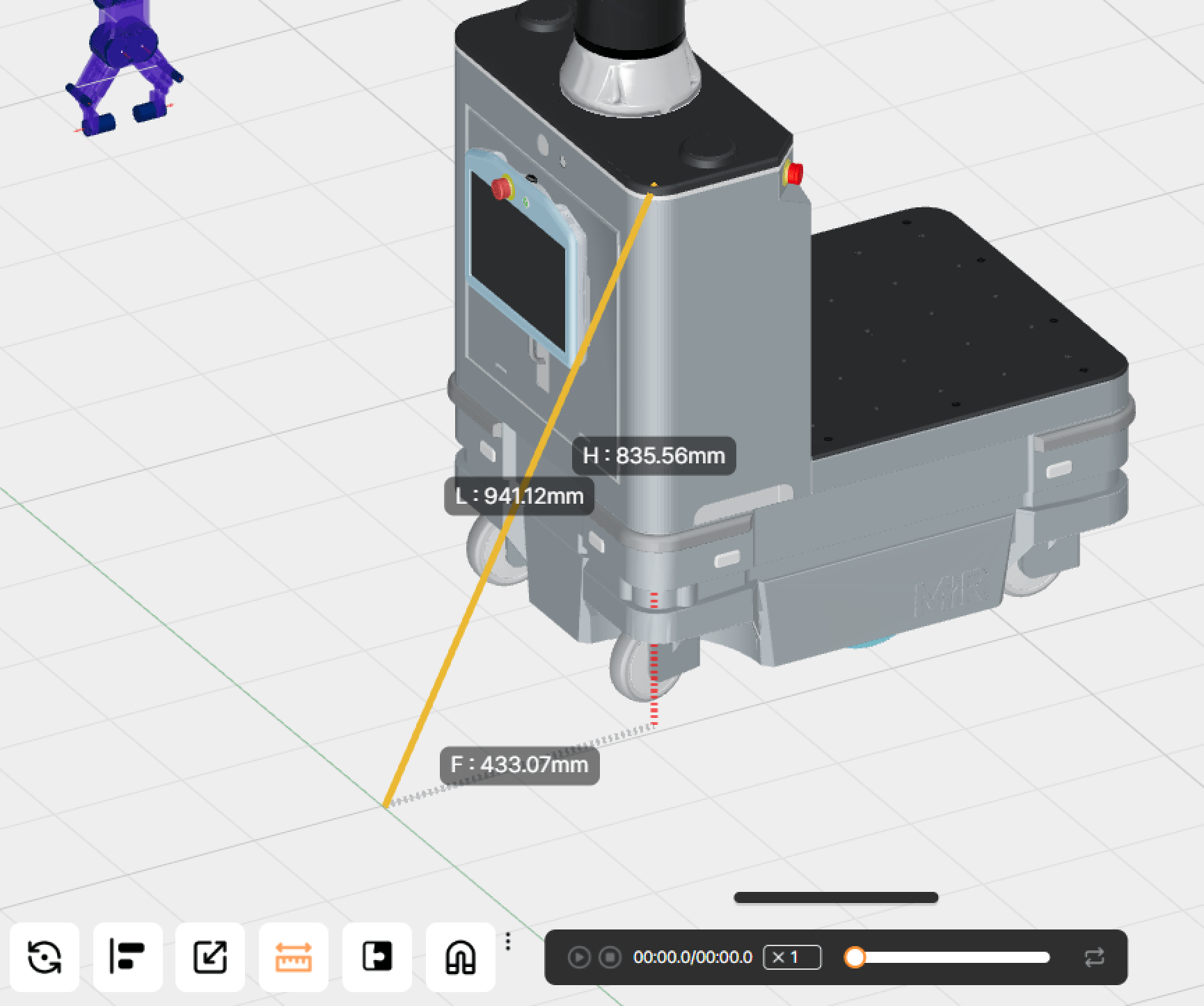
수치 측정 기능을 활성화한 후 두 지점을 클릭하면, 선택한 두 지점 사이의 거리를 측정할 수 있습니다.
⑨ Snap 설정
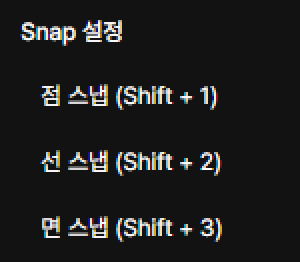
점 스냅(Shift + 1), 선 스냅(Shift + 2), 면 스냅(Shift + 3) 기능을 사용하여 두 객체의 꼭짓점, 모서리, 면끼리 스냅하여 정확하게 맞출 수 있습니다.
⑩ Snap 이동/회전 설정
피봇 컨트롤러(빨강, 파랑, 초록 화살표)를 사용하여 객체를 드래그하거나 회전할 때, 설정한 이동 거리(mm)와 회전 각도(degree) 단위만큼 일정하게 이동 또는 회전할 수 있도록 설정합니다.
⑪ 카테고리 메뉴
분석에 필요한 정보를 입력하거나 분석 실행과 관련된 옵션을 설정합니다.
상단 바 – 오른쪽 메뉴
⑫ 코멘트
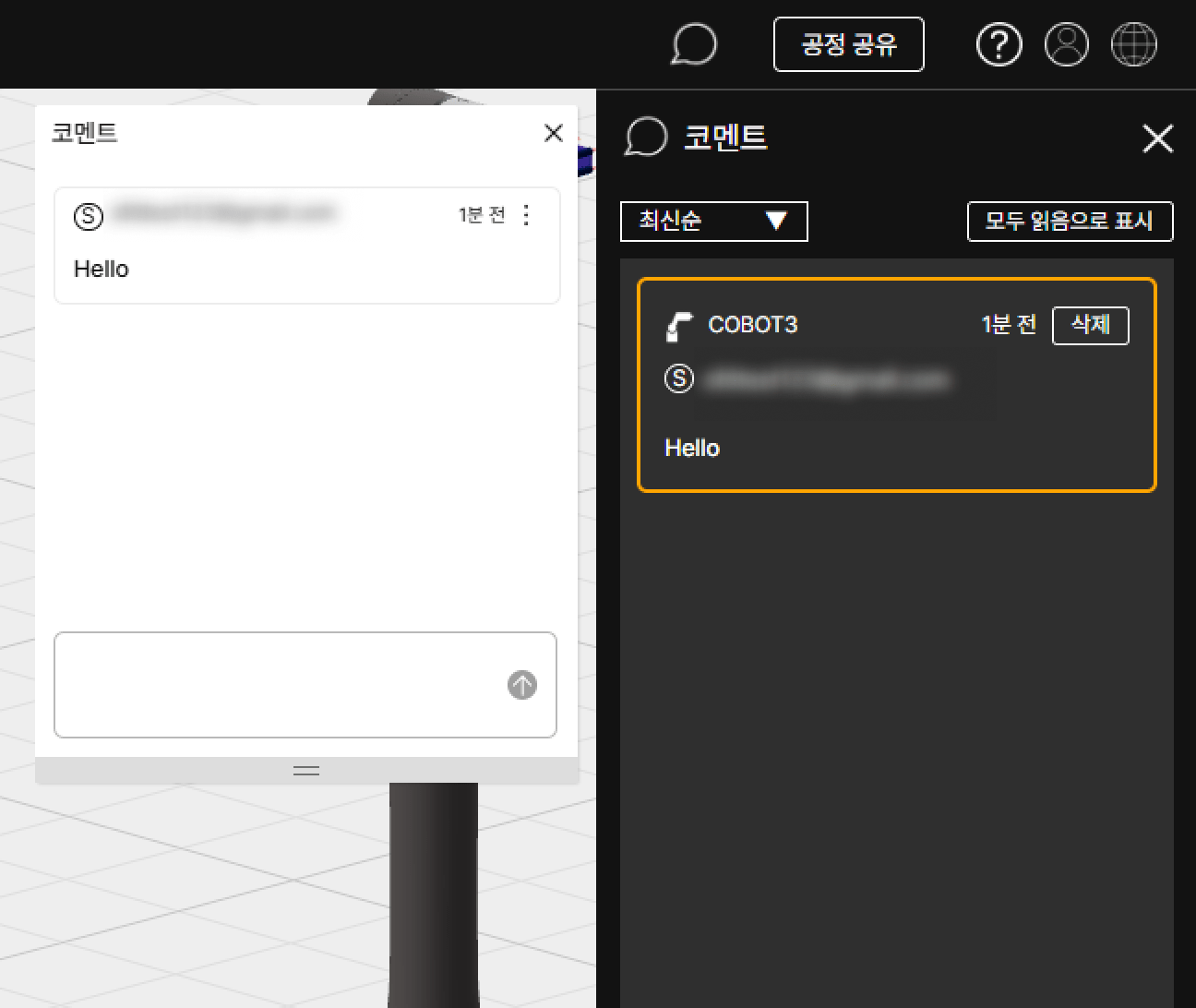
코멘트 버튼 클릭 상태
공정 내에 다른 유저가 작성한 댓글(코멘트)을 확인하거나 새로운 코멘트를 작성할 수 있습니다.
⑬ 공정 공유
열려있는 공정을 다른 유저와 이메일 링크를 통해 공유합니다.
팁
공정 공유 기능의 사용법에 대한 자세한 내용은 공정 공유하기에서 확인하세요.
⑭ 프로필 / 언어 변경
– 프로필 메뉴 : 회원정보 페이지, 보고서 발급 현황 페이지에 들어가거나 SafetyDesigner에서 로그아웃합니다.
– 언어 변경 : SafetyDesigner의 언어를 변경합니다. (한국어(한국) / English(US))
⑮ Safety AI
화면 우측 하단의 AI 어시스턴트 버튼을 클릭하면 로봇 시스템 안전에 대해 질문할 수 있는 Safety AI(베타) 채팅 패널이 열립니다. 새 대화를 시작하거나 이전 대화 목록을 확인할 수 있습니다.
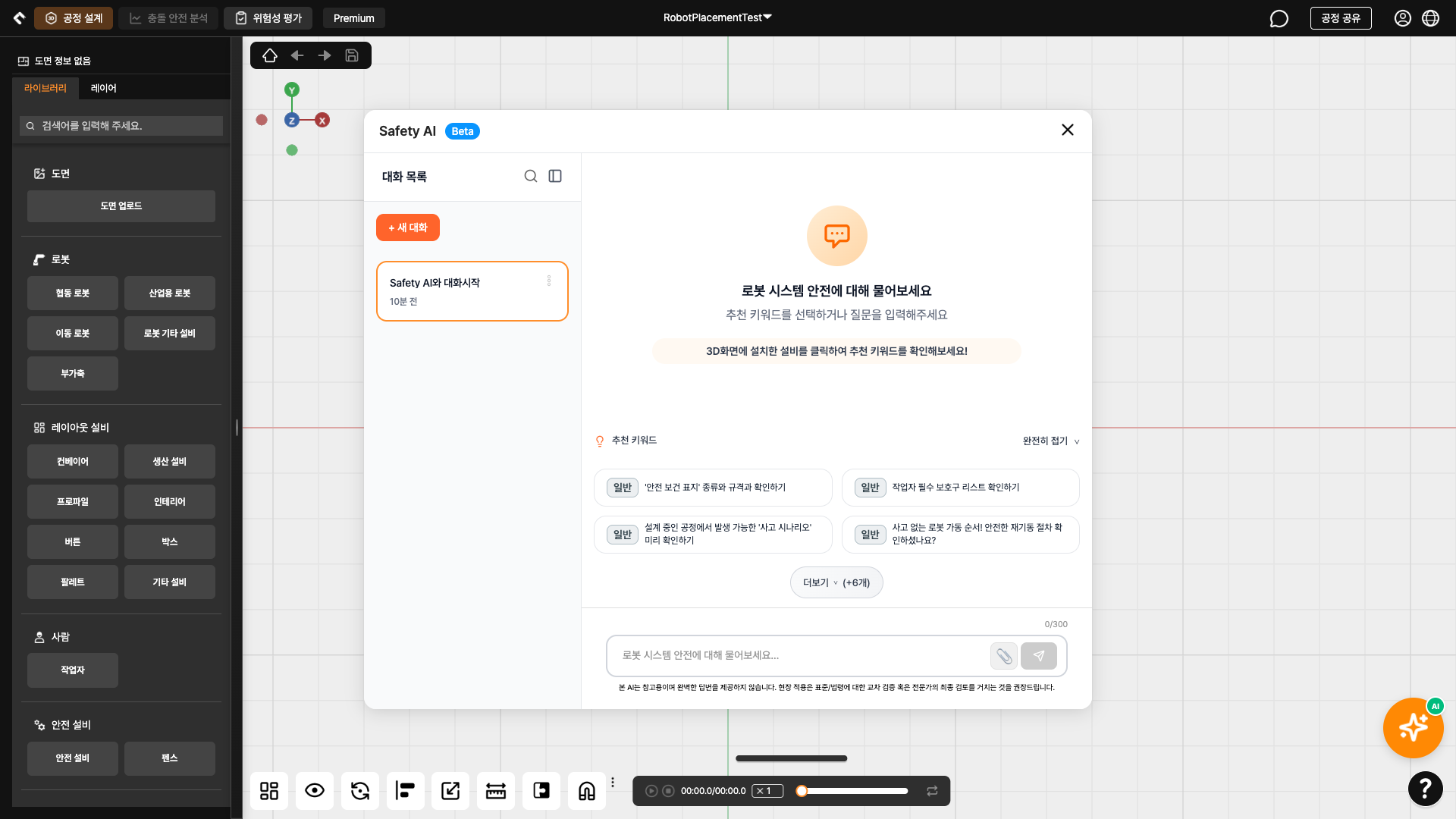
Safety AI 채팅 패널
2. 상세 화면 구성
2-1. 좌측 화면 구성
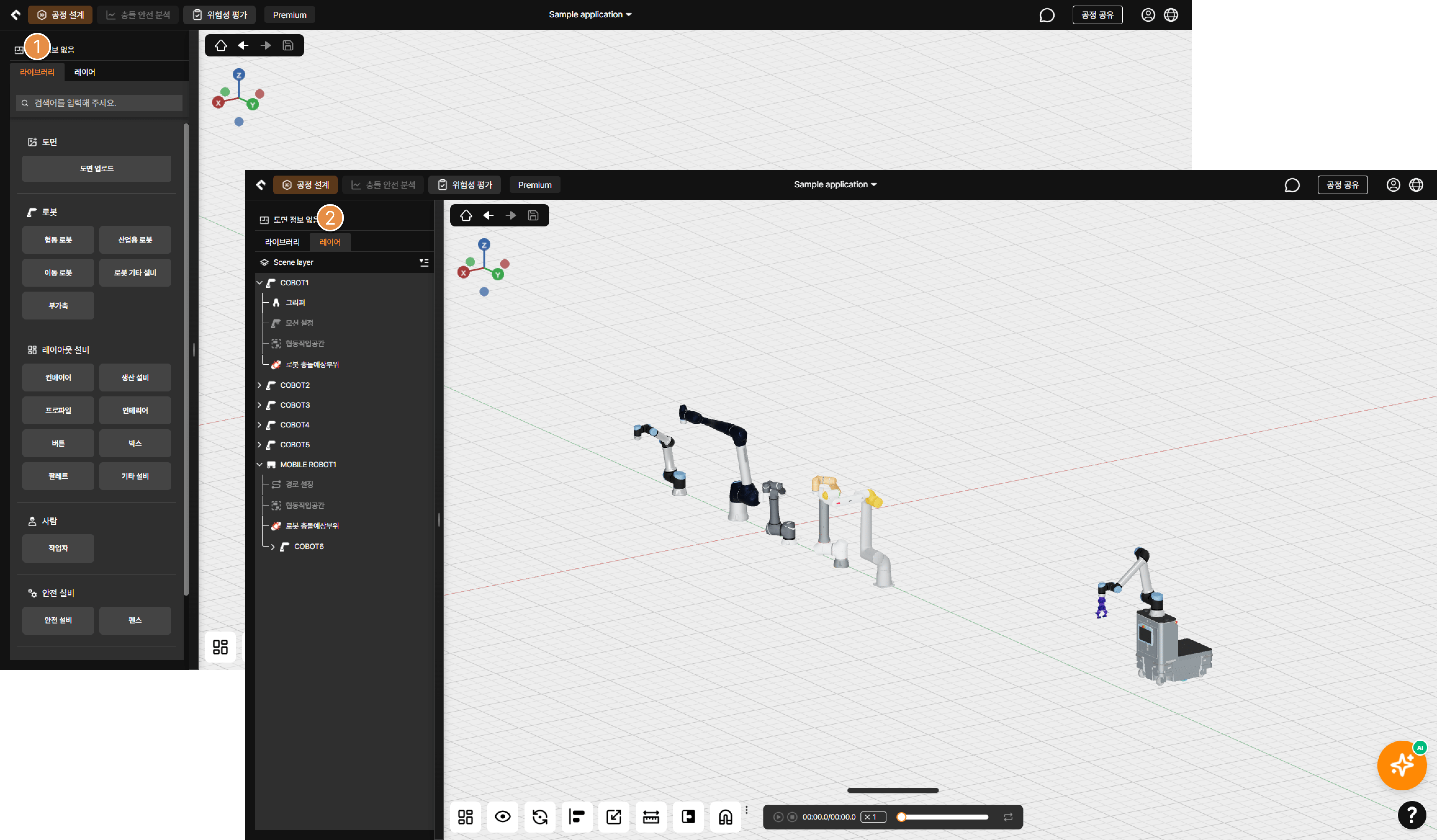
3D 화면 상세 구성
① 라이브러리
3D 화면에 배치할 로봇과 주변 설비물을 선택하거나 2D 도면 이미지를 업로드 할 수 있습니다.
② 레이어
3D 화면에 배치한 도면과 로봇, 설비 목록과 로봇에 설정한 분석 관련 정보를 확인할 수 있습니다.
2-2-1. 카테고리 메뉴 (머니퓰레이터)
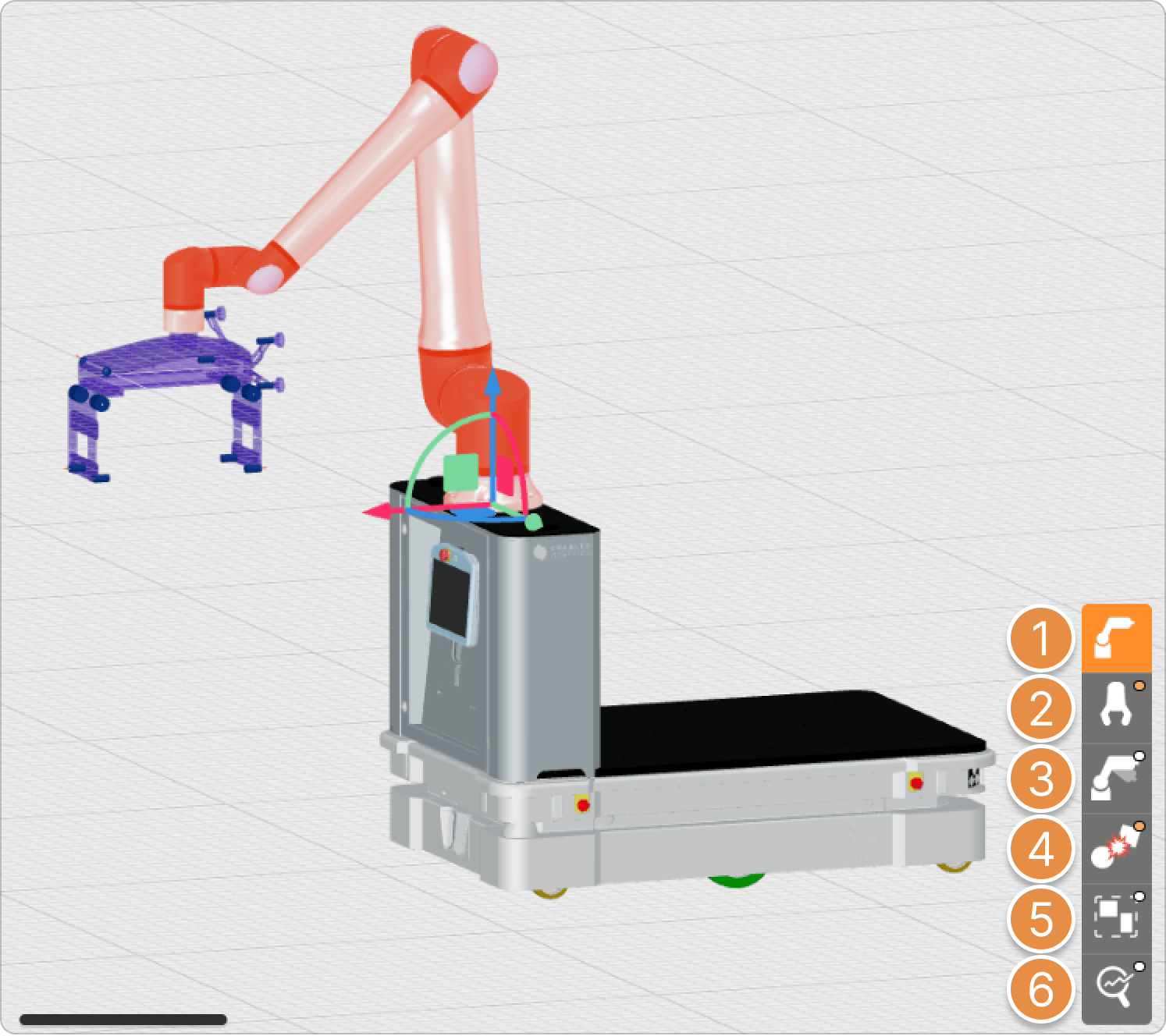
① 로봇 정보
로봇 배치 정보와 회전 각도 등을 설정합니다.
② 그리퍼
라이브러리에 있는 그리퍼 모델 중에 하나를 선택하여 분석에 사용하거나, 사용자 그리퍼 파일(3D CAD)을 업로드 할 수 있습니다.
③ 모션 설정
로봇에서 추출한 실제 모션을 업로드하거나 모션 생성 기능을 이용해 로봇 모션 정보를 입력합니다.
팁
모션 생성 기능의 사용 방법은 모션 생성이란? 을 참고하세요.
팁
모션 추출과 관련된 자세한 내용은 모션 추출 프로그램 사용하기를 참고하세요.
④ 충돌예상부위
그리퍼와 작업대상물의 3D 모델 위에 분석을 진행할 충돌 포인트를 지정합니다.
팁
충돌예상부위와 관련된 자세한 내용은 편리한 사용팁 페이지의 충돌예상부위란?을 참고하세요.
⑤ 협동작업공간
충돌안전분석을 진행할 2D 형태의 협동작업공간을 지정합니다.
⑥ 분석 옵션
분석 결과와 관련된 옵션을 설정할 수 있으며, 충돌안전분석을 실행합니다.
2-2-2. 카테고리 메뉴 (모바일 로봇)
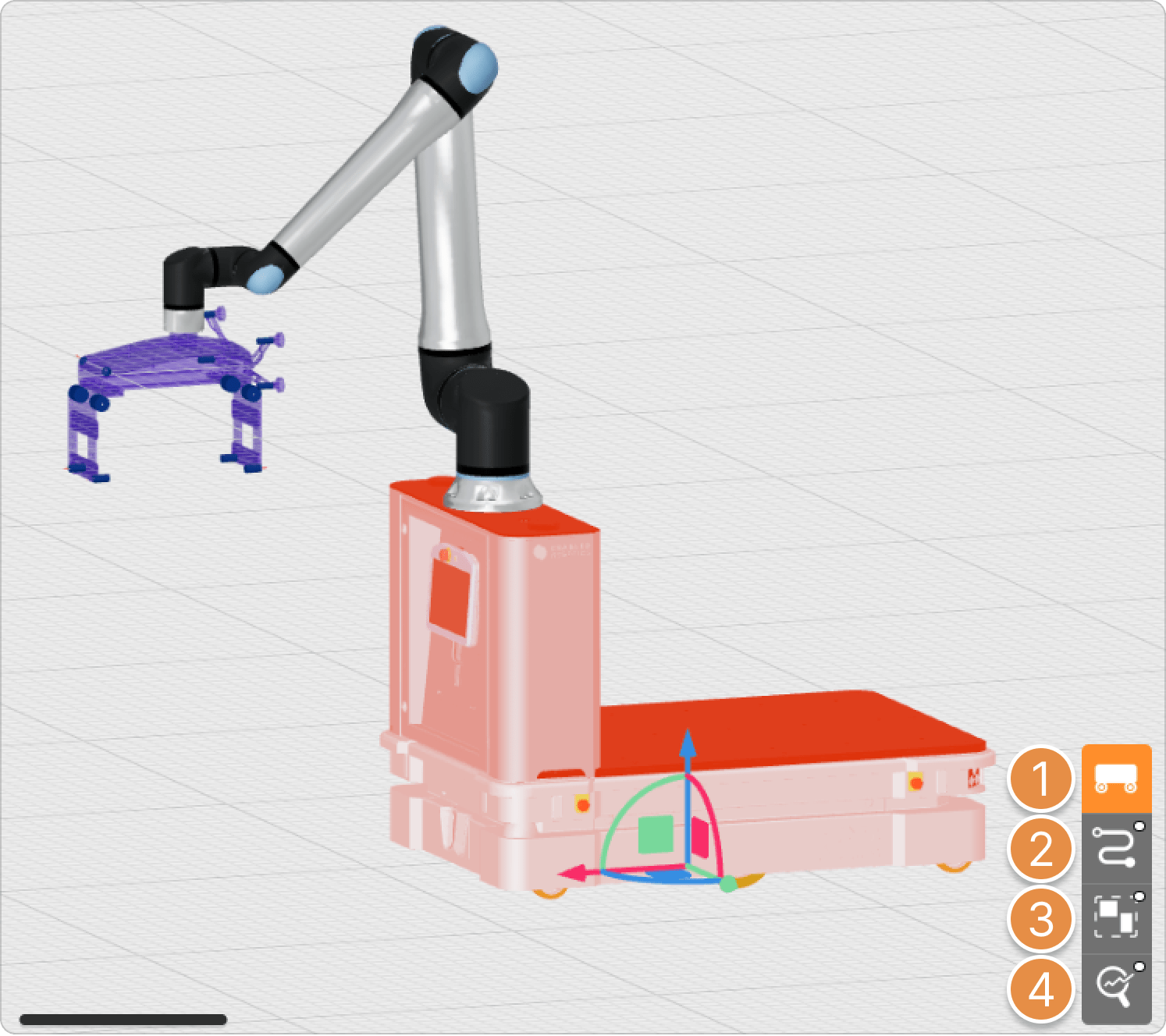
① 로봇 정보
로봇 배치 정보와 회전 각도 등을 설정합니다.
② 경로설정
Path Point 설정 기능을 통하여 분석에 사용할 모바일 로봇의 이동 경로를 설정할 수 있습니다. 모바일 로봇은 모션 추출 기능 및 모션 업로드 기능을 지원하지 않습니다.
③ 협동작업공간
충돌안전분석을 진행할 2D 형태의 협동작업공간을 지정합니다.
④ 분석 옵션
분석 결과와 관련된 옵션을 설정할 수 있으며, 충돌안전분석을 실행합니다.
2-2-3. 카테고리 메뉴 (부가축)
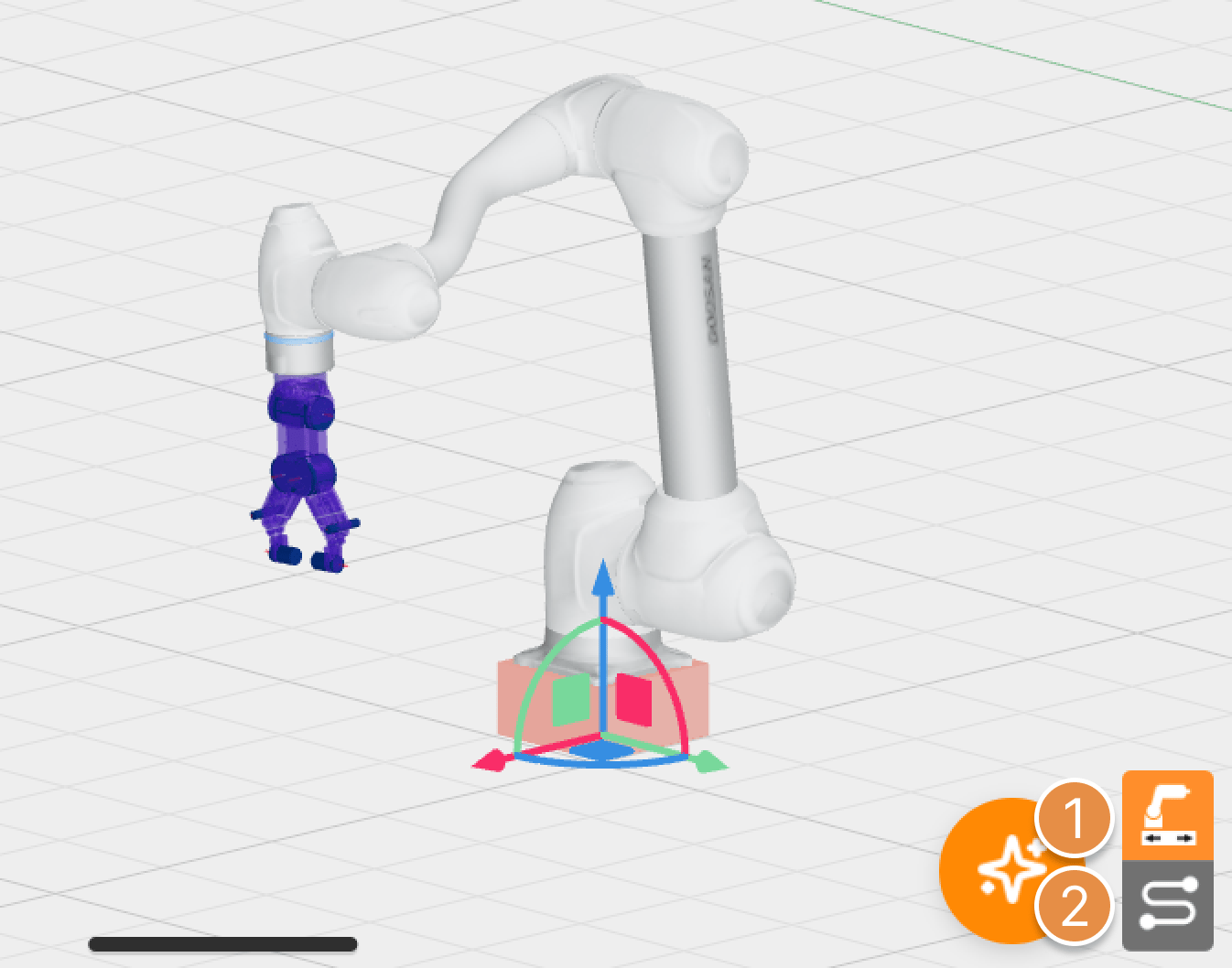
① 부가축 정보
부가축의 배치 정보와 회전 각도 등을 설정합니다.
② 경로설정
경로 설정 기능을 통하여 분석에 사용할 부가축의 이동 경로를 설정할 수 있습니다. 부가축은 모션 추출 기능 및 모션 업로드 기능을 지원하지 않으며, 모바일 로봇 경로 생성과 다르게 수직 이동 모션 (로봇의 상승/하강)도 설계할 수 있습니다.